基于FPGA/CPLD的LED阵列显示 (2025年)
2025年6月1日大约 34 分钟
基于FPGA/CPLD的LED阵列显示 (2025年)
BOM
- FPGA/CPLD开发板
- 杜邦线
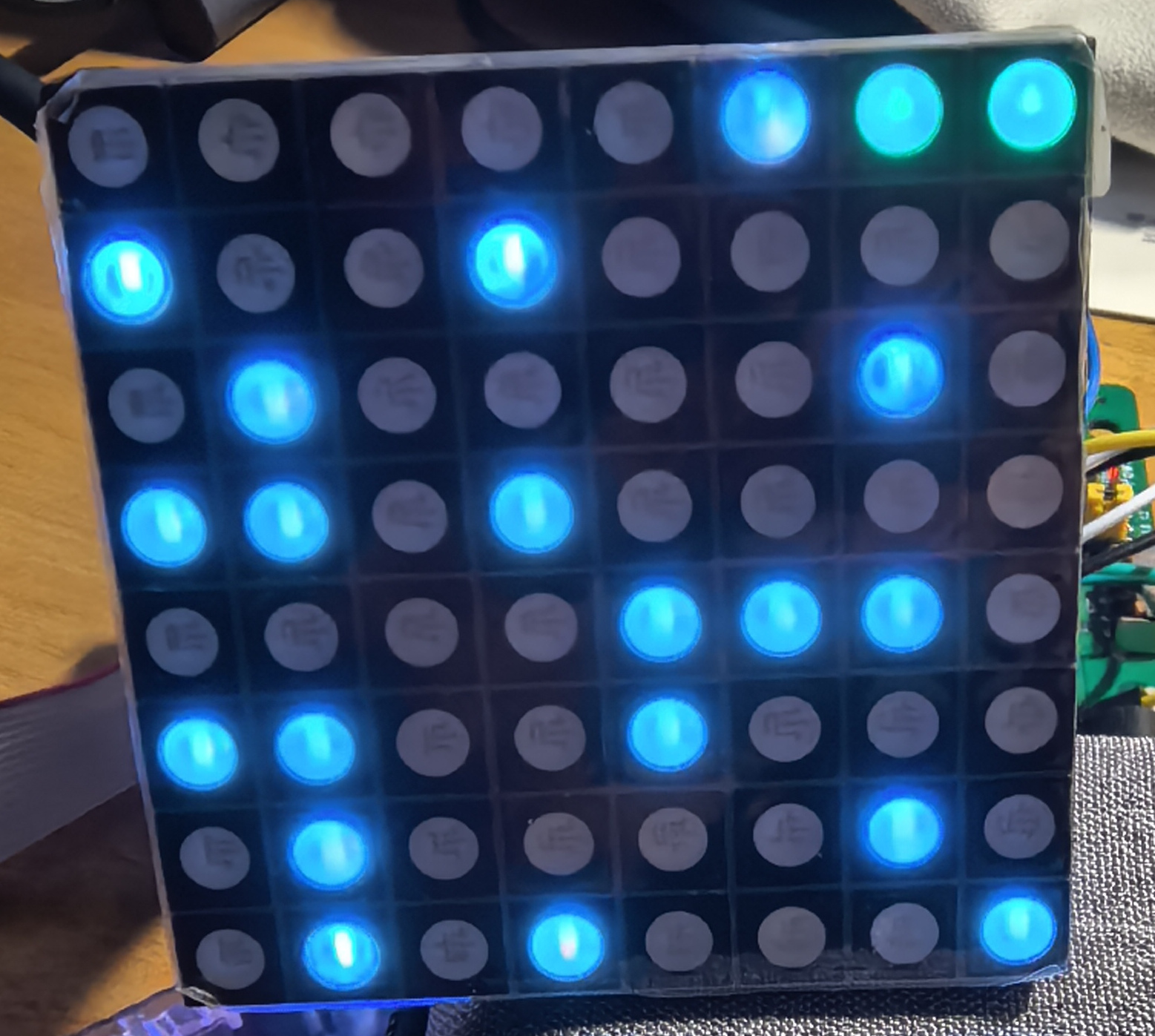
- 8*8阵列三色全彩共阳RGB LED点阵屏模块
LED阵列介绍
产品特征
- 8 $\times$ 8 点阵模块
- 发光点直径:5mm
- 发光颜色:RGB
- 外观颜色:黑色表面、白色字节
- 共阳极
- 材料:磷化铝铟镓、氮化镓
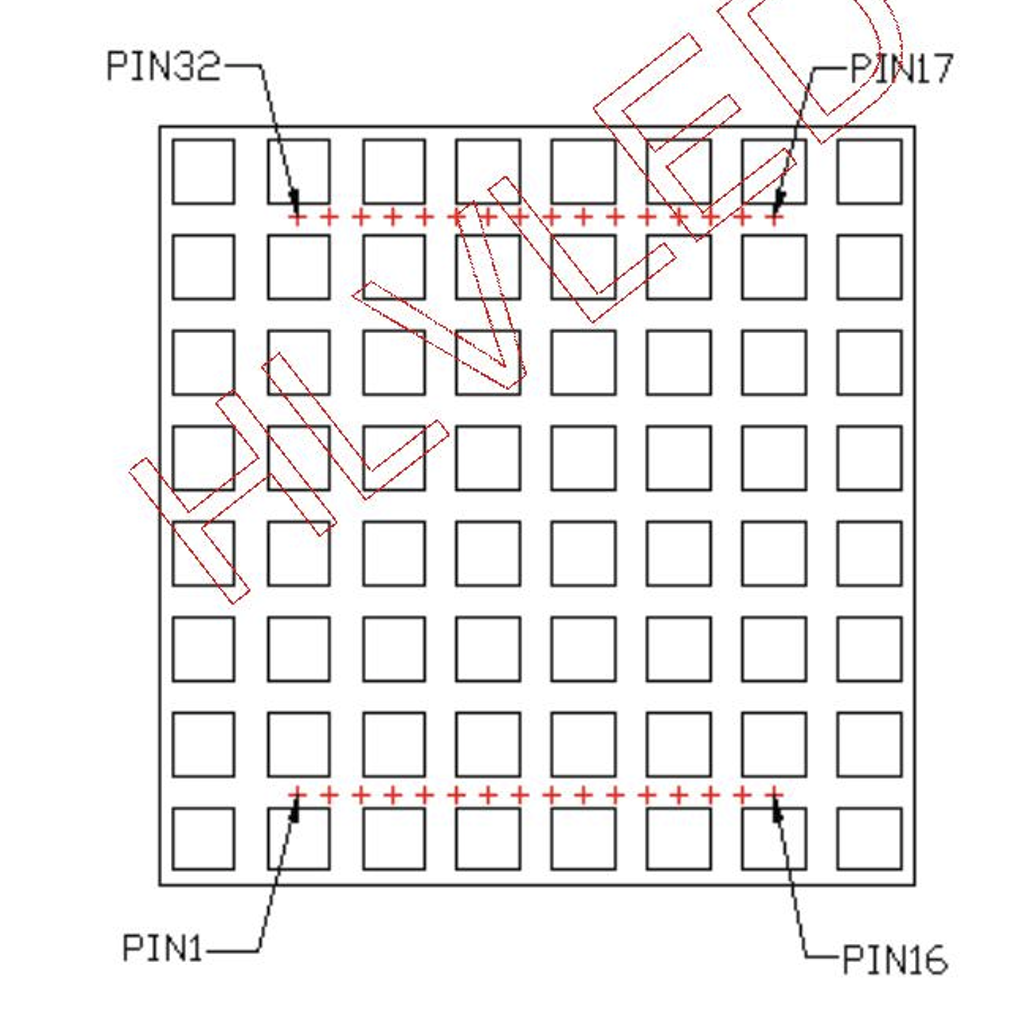
管脚图
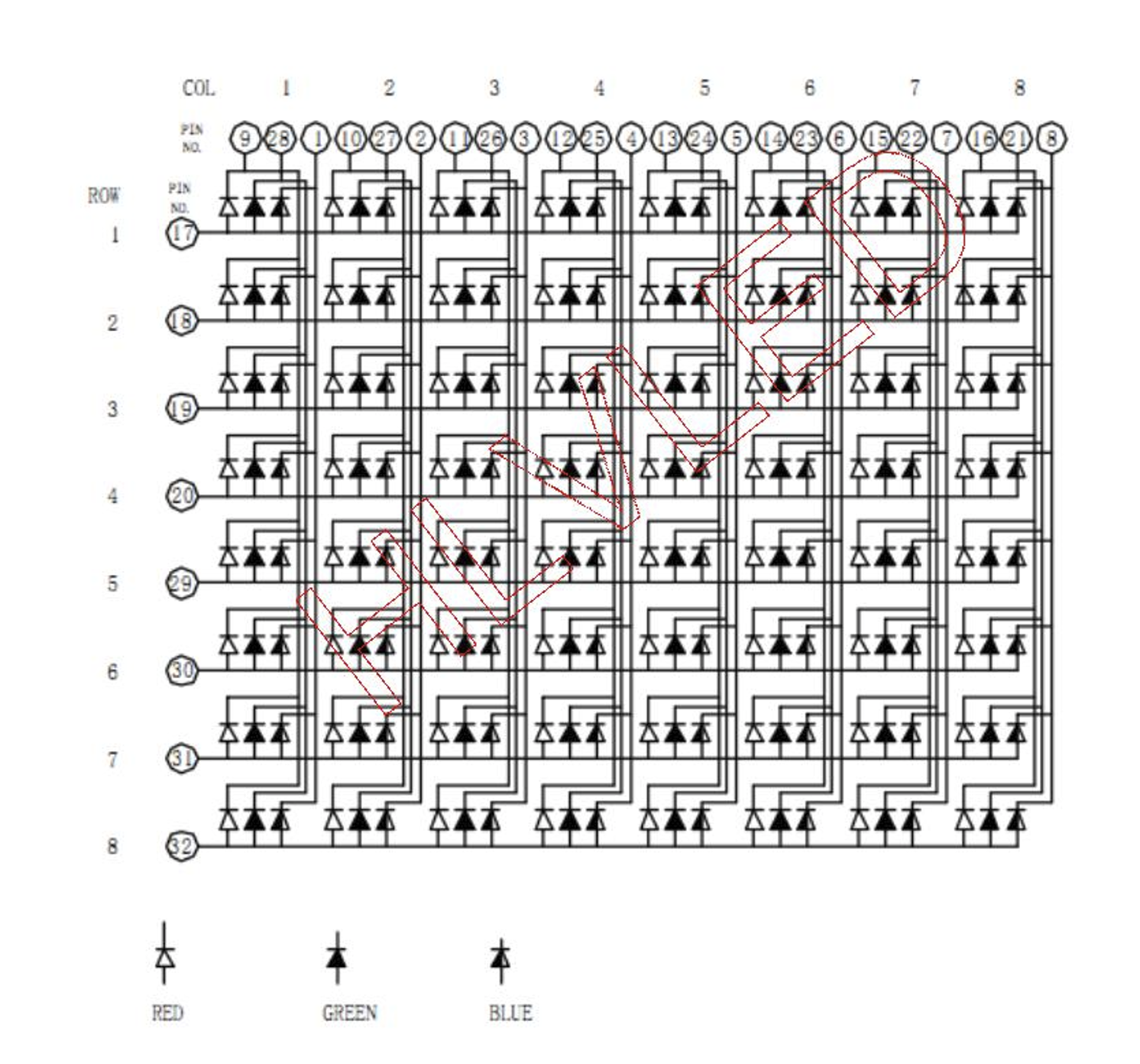
电路图
基于lattice CPLD开发板的LED阵列显示方案(参考)
管脚对应图
| LED阵列引脚 | CPLD引脚 | 备注(可选) |
|---|---|---|
| 1 | 16 | LED_col_b[0] |
| 2 | 18 | LED_col_b[1] |
| 3 | 20 | LED_col_b[2] |
| 4 | 24 | LED_col_b[3] |
| 5 | 27 | LED_col_b[4] |
| 6 | 29 | LED_col_b[5] |
| 7 | 31 | LED_col_b[6] |
| 8 | 34 | LED_col_b[7] |
| 9 | 36 | LED_col_r[0] |
| 10 | 38 | LED_col_r[1] |
| 11 | 40 | LED_col_r[2] |
| 12 | 42 | LED_col_r[3] |
| 13 | 45 | LED_col_r[4] |
| 14 | 48 | LED_col_r[5] |
| 15 | 51 | LED_col_r[6] |
| 16 | 53 | LED_col_r[7] |
| 17 | 52 | LED_row[0] |
| 18 | 49 | LED_row[1] |
| 19 | 47 | LED_row[2] |
| 20 | 43 | LED_row[3] |
| 21 | 41 | LED_col_g[7] |
| 22 | 39 | LED_col_g[6] |
| 23 | 37 | LED_col_g[5] |
| 24 | 35 | LED_col_g[4] |
| 25 | 32 | LED_col_g[3] |
| 26 | 30 | LED_col_g[2] |
| 27 | 28 | LED_col_g[1] |
| 28 | 25 | LED_col_g[0] |
| 29 | 21 | LED_row[4] |
| 30 | 19 | LED_row[5] |
| 31 | 17 | LED_row[6] |
| 32 | 15 | LED_row[7] |
设计流程
流水灯程序
流水灯的verilog源码
module Marquee (
input clk, // 50MHz时钟输入
input rst, //复位功能
output led[1:0], //指示灯
output reg [7:0] led_row, // 行控制信号(高电平有效)
output reg [7:0] led_col_r, // 列控制信号(低电平有效)
output reg [7:0] led_col_g, // 列控制信号(低电平有效)
output reg [7:0] led_col_b // 列控制信号(低电平有效)
);
// 分频器参数(�Hz�
parameter DIVIDER = 25_000_000;
// 状态定义
parameter S0 = 3'd0, S1 = 3'd1, S2 = 3'd2, S3 = 3'd3,
S4 = 3'd4, S5 = 3'd5, S6 = 3'd6, S7 = 3'd7;
// 消抖参数设置 (50MHz时钟对应20ms)
parameter DEBOUNCE_MS = 20; // 消抖时间(ms)
parameter CLK_FREQ = 50_000_000; // 时钟频率(Hz)
localparam DEBOUNCE_CYCLES = (DEBOUNCE_MS * CLK_FREQ) / 1000;
// 按钮同步逻辑
reg [1:0] btn_sync;
always @(posedge clk) btn_sync <= {btn_sync[0], ~rst}; // 注意这里取反
// 消抖计数器逻辑
reg [19:0] debounce_cnt;
reg btn_debounced;
always @(posedge clk) begin
// 当检测到输入变化时启动计数器
if(btn_sync[1] != btn_debounced) begin
if(debounce_cnt == DEBOUNCE_CYCLES) begin
btn_debounced <= btn_sync[1]; // 更新稳定值
debounce_cnt <= 0;
end else begin
debounce_cnt <= debounce_cnt + 1;
end
end else begin
debounce_cnt <= 0; // 状态未变化时保持清零
end
end
// 边沿检测逻辑
reg [1:0] edge_detect;
always @(posedge clk) edge_detect <= {edge_detect[0], btn_debounced};
wire btn_pressed = (edge_detect == 2'b10); // 检测下降沿
// 状态转移逻辑
// 8x8 LED状态寄存器
reg [24:0] counter;
reg clk_1hz;
reg [2:0] led_state;
always @(posedge clk) begin
if(btn_pressed) begin // 有效按键
counter <= 0;
clk_1hz <= 0;
led_row <= 8'b1111_1111;
led_state <= (led_state == S7) ? S0 : led_state + 1;
case (led_state)
S0 : begin
led_col_r <= 8'b1111_1111;
led_col_g <= 8'b1111_1111;
led_col_b <= 8'b1111_1111;
end
S1 : begin
led_col_r <= 8'b1111_1110;
led_col_g <= 8'b1111_1111;
led_col_b <= 8'b1111_1111;
end
S2 : begin
led_col_r <= 8'b1111_1111;
led_col_g <= 8'b1111_1110;
led_col_b <= 8'b1111_1111;
end
S3 : begin
led_col_r <= 8'b1111_1111;
led_col_g <= 8'b1111_1111;
led_col_b <= 8'b1111_1110;
end
S4 : begin
led_col_r <= 8'b1111_1110;
led_col_g <= 8'b1111_1110;
led_col_b <= 8'b1111_1111;
end
S5 : begin
led_col_r <= 8'b1111_1110;
led_col_g <= 8'b1111_1111;
led_col_b <= 8'b1111_1110;
end
S6 : begin
led_col_r <= 8'b1111_1111;
led_col_g <= 8'b1111_1110;
led_col_b <= 8'b1111_1110;
end
S7 : begin
led_col_r <= 8'b1111_1110;
led_col_g <= 8'b1111_1110;
led_col_b <= 8'b1111_1110;
end
endcase
end
else if (counter == DIVIDER - 1) begin
counter <= 0;
clk_1hz <= ~clk_1hz;
led_col_r <= {led_col_r[6:0], led_col_r[7]}; // 循环左移
led_col_g <= {led_col_g[6:0], led_col_g[7]}; // 循环左移
led_col_b <= {led_col_b[6:0], led_col_b[7]}; // 循环左移
end
else begin
counter <= counter + 1;
end
end
assign led[0] = rst;
assign led[1] = clk_1hz;
endmodule流水灯的testbench
`timescale 1us/1ns
module Marquee_tb;
// 定义仿真参数
reg clk;
reg rst;
wire [1:0] led;
wire [7:0] led_row;
wire [7:0] led_col_r;
wire [7:0] led_col_g;
wire [7:0] led_col_b;
defparam uut.DIVIDER = 25_000 ;
// 实例化被测模块
Marquee uut (
.clk(clk),
.rst(rst),
.led(led),
.led_row(led_row),
.led_col_r(led_col_r),
.led_col_g(led_col_g),
.led_col_b(led_col_b)
);
// 生成50kHz时钟
initial begin
clk = 0;
forever #10 clk = ~clk; // 20us周期 = 50kHz
end
// 测试序列
initial begin
// 初始化
rst = 1;
#100; // 保持复位100us
// 释放复位
rst = 0;
#100;
rst = 1;
#100_0; // 保持复位100us
// 释放复位
rst = 0;
#100_000;
rst = 1;
// 运行10个完整周期(约10秒)
#10_000_0;
// 结束仿真
$finish;
end
// 监视输出变化
always @(posedge uut.clk_1hz) begin
$display("Time: %0t us | LED_ROW: %08b", $time, led_row);
end
// 生成波形文件供查看
initial begin
$dumpfile("marquee_tb.vcd");
$dumpvars(0, Marquee_tb);
end
endmodule呼吸灯实验
为了可以让这个 $8 \times 8 \times 3$ 的LED阵列的亮度可以调节,我们需要定义一个缓存,把买个LED的亮度信息存储起来,在进行行扫描的时候,我们可以把每行的亮度信息都放到一个PWM控制器里面,为了让程序并行度更高,我们需要假设LED都有8位的亮度信息,我们这个缓存的大小为 $ 8 \times 8 \times 3 \times 8 $ 位大小。
呼吸灯源码
module led_matrix_top (
input clk, // 系统时钟 (50MHz)
input rst, // 异步复位 (低有效)
output [7:0] led_row, // 行选择 (低有效)
output [7:0] led_col_r, // R列输出 (低有效)
output [7:0] led_col_g, // G列输出 (低有效)
output [7:0] led_col_b // B列输出 (低有效)
);
// ================== 呼吸灯控制部分 ================== //
localparam BREATHE_PERIOD = 28'd5_000_000; // 2秒呼吸周期 (50MHz * 0.1s)
reg [27:0] breathe_counter;
reg breathe_dir; // 0:递增, 1:递减
reg [7:0] global_brightness;
// 亮度数据阵列(二维数组:8行,每行64位存储8个LED的亮度)
reg [63:0] brightness_r [0:7]; // R亮度 [行][64位数据]
reg [63:0] brightness_g [0:7]; // G亮度 [行][64位数据]
reg [63:0] brightness_b [0:7]; // B亮度 [行][64位数据]
// 呼吸灯控制逻辑
always @(posedge clk or negedge rst) begin
if (!rst) begin
breathe_counter <= 28'd0;
breathe_dir <= 0;
global_brightness <= 8'd0;
end else begin
// 呼吸计数器
breathe_counter <= (breathe_counter == BREATHE_PERIOD - 1)
? 28'd0 : breathe_counter + 1;
// 亮度方向控制
if (breathe_counter == BREATHE_PERIOD - 1) begin
if (breathe_dir == 0) begin
global_brightness <= (global_brightness == 255)
? 254 : global_brightness + 1;
breathe_dir <= (global_brightness == 254) ? 1 : 0;
end else begin
global_brightness <= (global_brightness == 0)
? 1 : global_brightness - 1;
breathe_dir <= (global_brightness == 1) ? 0 : 1;
end
end
end
end
// 生成所有LED的亮度数据
genvar i, j;
generate
for (i = 0; i < 8; i = i + 1) begin : row_gen
for (j = 0; j < 8; j = j + 1) begin : col_gen
always @(posedge clk or negedge rst) begin
if (!rst) begin
brightness_r[i][j*8 +: 8] <= 8'd0;
brightness_g[i][j*8 +: 8] <= 8'd0;
brightness_b[i][j*8 +: 8] <= 8'd0;
end else begin
brightness_r[i][j*8 +: 8] <= global_brightness;
brightness_g[i][j*8 +: 8] <= global_brightness;
brightness_b[i][j*8 +: 8] <= global_brightness;
end
end
end
end
endgenerate
// ================== LED驱动部分 ================== //
// 内部信号定义
reg [7:0] pwm_counter; // PWM计数器 (0-255)
reg [2:0] row_counter; // 行计数器 (0-7)
reg [63:0] current_row_r; // 当前行R亮度数据(64位)
reg [63:0] current_row_g; // 当前行G亮度数据(64位)
reg [63:0] current_row_b; // 当前行B亮度数据(64位)
// PWM计数器 (8位 256级)
always @(posedge clk or negedge rst) begin
if (!rst)
pwm_counter <= 8'd0;
else
pwm_counter <= pwm_counter + 1;
end
// 行计数器 (每256个时钟周期切换一行)
always @(posedge clk or negedge rst) begin
if (!rst)
row_counter <= 3'd0;
else if (pwm_counter == 8'd255) // 在PWM周期结束时切换行
row_counter <= row_counter + 1;
end
// 行选择译码器 (低有效)
assign led_row = ~(8'b1 << row_counter);
// 亮度数据锁存 (在行切换时更新)
always @(posedge clk or negedge rst) begin
if (!rst) begin
current_row_r <= 64'd0;
current_row_g <= 64'd0;
current_row_b <= 64'd0;
end
else if (pwm_counter == 8'd255) begin
// 锁存新行的RGB数据
current_row_r <= brightness_r[row_counter];
current_row_g <= brightness_g[row_counter];
current_row_b <= brightness_b[row_counter];
end
end
// PWM输出生成
reg [7:0] col_r;
reg [7:0] col_g;
reg [7:0] col_b;
integer col;
always @(posedge clk or negedge rst) begin
if (!rst) begin
col_r <= 8'hFF;
col_g <= 8'hFF;
col_b <= 8'hFF;
end
else begin
// 比较每个LED的亮度值与PWM计数器
for (col = 0; col < 8; col = col + 1) begin
// R列
if (current_row_r[col*8 +: 8] > pwm_counter)
col_r[col] <= 1'b0; // 点亮
else
col_r[col] <= 1'b1; // 熄灭
// G列
if (current_row_g[col*8 +: 8] > pwm_counter)
col_g[col] <= 1'b0; // 点亮
else
col_g[col] <= 1'b1; // 熄灭
// B列
if (current_row_b[col*8 +: 8] > pwm_counter)
col_b[col] <= 1'b0; // 点亮
else
col_b[col] <= 1'b1; // 熄灭
end
end
end
assign led_col_r = col_r;
assign led_col_g = col_g;
assign led_col_b = col_b;
endmodule呼吸灯测试代码
`timescale 1ns / 1ps
module tb_led_matrix();
reg clk;
reg rst;
wire [7:0] led_row;
wire [7:0] led_col_r;
wire [7:0] led_col_g;
wire [7:0] led_col_b;
// 实例化顶层模块
led_matrix_top uut (
.clk(clk),
.rst(rst),
.led_row(led_row),
.led_col_r(led_col_r),
.led_col_g(led_col_g),
.led_col_b(led_col_b)
);
// 时钟生成 (50MHz)
initial begin
clk = 0;
forever #10 clk = ~clk; // 20ns周期 = 50MHz
end
// 复位信号
initial begin
rst = 0;
#100 rst = 1; // 100ns后释放复位
end
// 设置波形文件输出
initial begin
$dumpfile("led_matrix_driver_tb.vcd"); // 指定波形文件名
$dumpvars(0, tb_led_matrix); // 转储所有层次的信号
$dumpvars(1, uut); // 详细转储顶层模块内部信号
end
// 减少display使用 - 只显示关键事件
reg [31:0] last_time;
initial last_time = 0;
// 使用合并后的模块信号路径
always @(posedge uut.row_counter) begin
if ($time - last_time > 1_000_000) begin // 每1ms显示一次
$display("Time=%fms | Current Row=%d | Global Brightness=%d",
$time/1_000_000.0, uut.row_counter, uut.global_brightness);
last_time = $time;
end
end
// 测试持续时间 - 延长到2秒呼吸周期
initial begin
#20_000_000; // 模拟2秒(测试完整呼吸周期)
$display("Simulation completed successfully");
$finish;
end
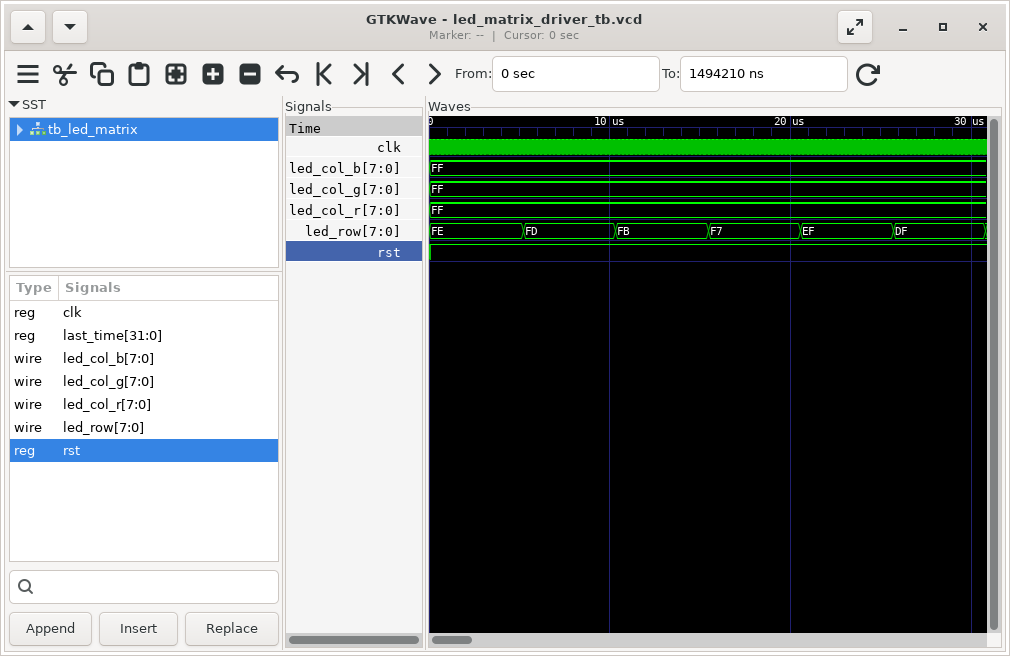
endmodule仿真结果
SPI接口程序
SPI slave的源码
module led_spi_slave (
input clk, // 系统时钟 (e.g., 50MHz)
input rst, // 异步复位(低电平有效)
input sclk, // SPI时钟 (从主设备)
input mosi, // SPI主出从入
input cs, // 片选 (低有效)
output reg [7:0] red [0:63], // 红色分量存储(一维64元素)
output reg [7:0] green [0:63], // 绿色分量存储(一维64元素)
output reg [7:0] blue [0:63], // 蓝色分量存储(一维64元素)
output reg data_valid // 数据有效信号
);
// 内部寄存器和状态定义
reg [31:0] shift_reg; // 32位移位寄存器
reg [4:0] bit_count; // 位计数器 (0-31)
reg sclk_delayed; // 用于边沿检测的延迟sclk
reg [5:0] addr_reg; // 地址寄存器(直接用作一维索引)
reg [23:0] rgb_reg; // RGB数据寄存器
reg [1:0] state; // 状态机
// SPI模式0参数
localparam IDLE = 2'b00;
localparam RECEIVE = 2'b01;
localparam UPDATE = 2'b10;
localparam FINISHED = 2'b11;
// 边沿检测:检测sclk上升沿
wire sclk_rising = (sclk && !sclk_delayed);
// 使用generate初始化存储器
genvar i;
generate
for (i = 0; i < 64; i = i + 1) begin : INIT_MEM
always @(posedge clk or negedge rst) begin
if (!rst) begin
// 初始化单个LED
red[i] <= 8'h00;
green[i] <= 8'h00;
blue[i] <= 8'h00;
end
else if (state == FINISHED && addr_reg == i) begin
// 更新单个LED
red[i] <= rgb_reg[23:16]; // R分量
green[i] <= rgb_reg[15:8]; // G分量
blue[i] <= rgb_reg[7:0]; // B分量
end
end
end
endgenerate
// 主状态机
always @(posedge clk or negedge rst) begin
if (!rst) begin
state <= IDLE;
shift_reg <= 32'b0;
bit_count <= 0;
data_valid <= 0;
sclk_delayed <= 0;
addr_reg <= 6'b0;
rgb_reg <= 24'b0;
end else begin
sclk_delayed <= sclk; // 延迟sclk用于边沿检测
data_valid <= 0; // 默认数据有效信号为低
case (state)
IDLE: begin
bit_count <= 0;
if (!cs) begin // 片选激活
state <= RECEIVE;
end
end
RECEIVE: begin
if (sclk_rising) begin // SPI时钟上升沿采样数据
shift_reg <= {shift_reg[30:0], mosi}; // 左移并捕获新位
bit_count <= bit_count + 1;
if (bit_count == 31) begin
// 完整32位接收完毕
state <= UPDATE;
end
end
if (cs) begin // 片选失效,中断接收
state <= IDLE;
end
end
UPDATE: begin
addr_reg <= shift_reg[29:24]; // 提取地址位[29:24]
rgb_reg <= shift_reg[23:0]; // 提取RGB数据[23:0]
state <= FINISHED; // 转至更新状态
end
FINISHED: begin
// LED更新现在由generate块处理
data_valid <= 1; // 置位数据有效信号
if (cs) begin
state <= IDLE;
end
end
endcase
end
end
endmodulespi slave的testbench
`timescale 1ns / 1ps
module tb_led_spi_slave();
// 测试信号
reg clk = 0;
reg rst = 1;
reg spi_clk = 0;
wire sclk;
reg mosi = 0;
reg cs = 1; // 初始片选无效
wire [7:0] red [0:63]; // 修改为一维数组
wire [7:0] green [0:63]; // 修改为一维数组
wire [7:0] blue [0:63]; // 修改为一维数组
wire data_valid;
// 实例化SPI接收器
led_spi_slave dut (
.clk(clk),
.rst(rst),
.sclk(sclk),
.mosi(mosi),
.cs(cs),
.red(red),
.green(green),
.blue(blue),
.data_valid(data_valid)
);
// 50MHz系统时钟生成
always #10 clk = ~clk;
// SPI时钟生成 (1MHz)
always #500 spi_clk = ~spi_clk;
assign sclk = !cs & spi_clk;
// 发送单个32位数据包的任务
task send_packet;
input [5:0] address;
input [23:0] rgb;
reg [31:0] data;
integer i;
begin
data = {2'b00, address, rgb}; // 组合32位数据
cs = 0; // 激活片选
#50; // 等待片选稳定
// 发送32位数据 (MSB优先)
for (i = 31; i >= 0; i = i - 1) begin
mosi = data[i]; // 输出当前位
#1000; // 等待SPI时钟周期
end
cs = 1; // 关闭片选
#10000; // 完成传输
end
endtask
// 设置波形文件输出
initial begin
$dumpfile("led_spi_slave.vcd"); // 指定波形文件名
$dumpvars(0, tb_led_spi_slave); // 转储所有层次的信号
$dumpvars(1, dut); // 详细转储顶层模块内部信号
end
// 测试序列
initial begin
// 初始化
#1000;
rst = 0;
#10000;
rst = 1;
#10000;
// 测试1: 发送地址0x00 (索引0) 红色LED
send_packet(6'h00, {8'hFF, 8'h00, 8'h00});
#1000;
// 验证数据 (使用一维索引)
if (red[0] !== 8'hFF || green[0] !== 8'h00 || blue[0] !== 8'h00) begin
$display("Test 1 FAILED! Got R:%h G:%h B:%h", red[0], green[0], blue[0]);
$finish;
end
// 测试2: 发送地址0x09 (索引9) 绿色LED
send_packet(6'h09, {8'h00, 8'hFF, 8'h00});
#10000;
// 验证数据 (使用一维索引)
if (red[9] !== 8'h00 || green[9] !== 8'hFF || blue[9] !== 8'h00) begin
$display("Test 2 FAILED! Got R:%h G:%h B:%h", red[9], green[9], blue[9]);
$finish;
end
// 测试3: 发送地址0x3F (索引63) 蓝色LED
send_packet(6'h3F, {8'h00, 8'h00, 8'hFF});
#10000;
// 验证数据 (使用一维索引)
if (red[63] !== 8'h00 || green[63] !== 8'h00 || blue[63] !== 8'hFF) begin
$display("Test 3 FAILED! Got R:%h G:%h B:%h", red[63], green[63], blue[63]);
$finish;
end
// 测试4: 发送有效和无效地址
send_packet(6'h38, {8'hFF, 8'hFF, 8'hFF}); // 有效地址(56)
#10000;
// 验证有效地址更新,无效地址不更新
if (red[56] !== 8'hFF) begin
$display("Test 4 FAILED! Valid address not updated");
$finish;
end
// 测试5: 部分传输中断
cs = 0; // 激活片选
#10000;
mosi = 1; // 发送1位
#10000;
cs = 1; // 中断传输
#10000;
// 验证未完成传输未更新数据
if (data_valid !== 0) begin
$display("Test 5 FAILED! Partial transmission set data_valid");
$finish;
end
$display("All tests PASSED!");
$finish;
end
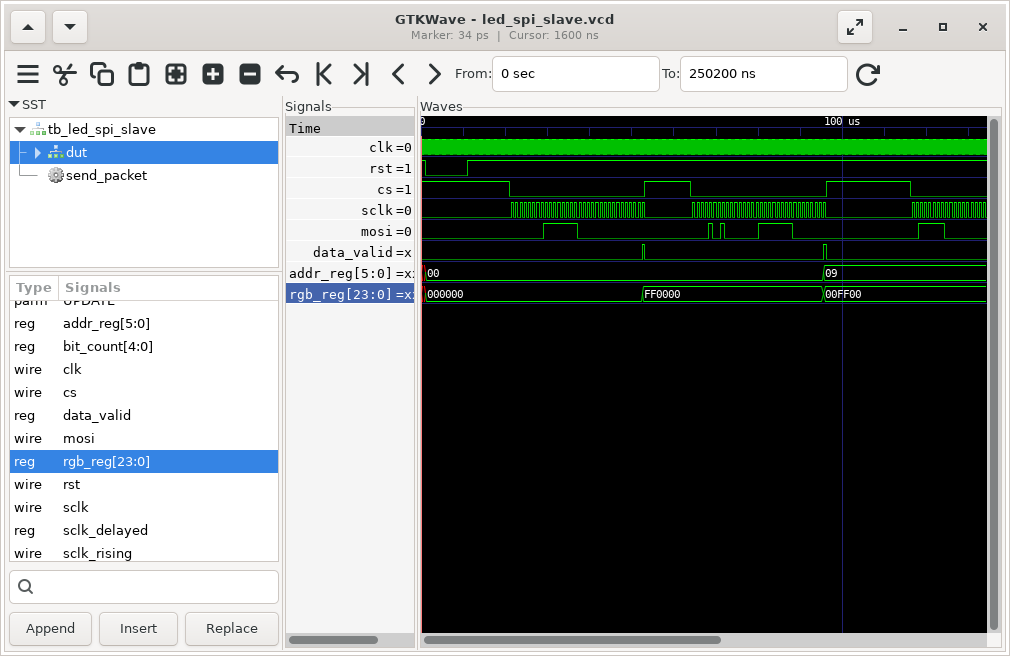
endmodulespi slave的iverilog仿真波形
完成的驱动程序
verilog源码
module led_matrix_top (
input clk, // 系统时钟 (50MHz)
input rst, // 异步复位 (低有效)
output [7:0] led_row, // 行选择 (高有效)
output [7:0] led_col_r, // R列输出 (低有效)
output [7:0] led_col_g, // G列输出 (低有效)
output [7:0] led_col_b, // B列输出 (低有效)
input sclk, // SPI时钟 (从主设备)
input mosi, // SPI主出从入
input cs, // 片选 (低有效)
output [1:0] led
);
assign led[1] = rst;
// =====================================================
// 时钟分频逻辑
// =====================================================
// parameter N = 32'd24_414; // 50,000,000 / 2,048 ≈ 24,414
// parameter N = 32'd31_250; //50,000,000 / 16 / 10 = 32,250
parameter N = 32'd3_000; //60FPS
// parameter N = 8; //仿真的时候,选用N=8加快仿真速度
reg [31:0] clkgen_counter; // 分频计数器
reg clk_out_reg; // 输出寄存器
wire clk_2048;
always @(posedge clk or negedge rst) begin
if (!rst) begin
clkgen_counter <= 0;
clk_out_reg <= 0;
end else begin
if (clkgen_counter == N - 1) begin
clkgen_counter <= 0;
clk_out_reg <= ~clk_out_reg;
end else begin
clkgen_counter <= clkgen_counter + 1;
end
end
end
assign clk_2048 = clk_out_reg;
// =====================================================
// SPI接收逻辑
// =====================================================
reg [31:0] spi_shift_reg; // 32位移位寄存器
reg [4:0] spi_bit_count; // 位计数器 (0-31)
reg [5:0] spi_addr_reg; // 地址寄存器
reg [23:0] spi_rgb_reg; // RGB数据寄存器
reg [1:0] spi_state; // 状态机
// 颜色存储阵列 (修改为4位宽度)
reg [3:0] red [0:63]; // 红色分量 (4位)
reg [3:0] green [0:63]; // 绿色分量 (4位)
reg [3:0] blue [0:63]; // 蓝色分量 (4位)
reg spi_data_valid; // 数据有效信号
// 状态定义
localparam SPI_IDLE = 2'b00;
localparam SPI_RECEIVE = 2'b01;
localparam SPI_UPDATE = 2'b10;
localparam SPI_FINISHED = 2'b11;
// 边沿检测:检测sclk上升沿
// 两级同步寄存器避免亚稳态
reg [1:0] sync_reg;
// 同步化SPI时钟信号
always @(posedge clk or negedge rst) begin
if (!rst) begin
sync_reg <= 2'b00;
end else begin
sync_reg <= {sync_reg[0], sclk};
end
end
// 延迟一拍的同步信号
reg sclk_delayed;
always @(posedge clk or negedge rst) begin
if (!rst) begin
sclk_delayed <= 1'b0;
end else begin
sclk_delayed <= sync_reg[1];
end
end
wire sclk_rising = (sync_reg[1] && !sclk_delayed);
// 初始化存储器
integer i;
// 主状态机
always @(posedge clk or negedge rst) begin
if (!rst) begin
spi_state <= SPI_IDLE;
spi_shift_reg <= 32'b0;
spi_bit_count <= 0;
spi_data_valid <= 0;
spi_addr_reg <= 6'b0;
spi_rgb_reg <= 24'b0;
for (i = 0; i < 64; i = i + 1) begin
red[i] <= 4'h0;
green[i] <= 4'h0;
blue[i] <= 4'h0;
end
end else begin
case (spi_state)
SPI_IDLE: begin
spi_bit_count <= 0;
spi_data_valid <= 0; // 默认数据有效信号为低
if (!cs) begin // 片选激活
spi_state <= SPI_RECEIVE;
end
end
SPI_RECEIVE: begin
if (sclk_rising) begin // SPI时钟上升沿采样数据
spi_shift_reg <= {spi_shift_reg[30:0], mosi}; // 左移并捕获新位
spi_bit_count <= spi_bit_count + 1;
if (spi_bit_count == 31) begin
spi_state <= SPI_UPDATE;
end
end
if (cs) begin // 片选失效,中断接收
spi_state <= SPI_IDLE;
end
end
SPI_UPDATE: begin
spi_addr_reg <= spi_shift_reg[29:24]; // 提取地址位[29:24]
spi_rgb_reg <= spi_shift_reg[23:0]; // 提取RGB数据[23:0]
spi_state <= SPI_FINISHED;
end
SPI_FINISHED: begin
// 更新LED颜色 (仅存储高4位)
red[spi_addr_reg] <= spi_rgb_reg[23:20]; // R高4位
green[spi_addr_reg] <= spi_rgb_reg[15:12]; // G高4位
blue[spi_addr_reg] <= spi_rgb_reg[7:4]; // B高4位
spi_data_valid <= 1; // 置位数据有效信号
if (cs) begin
spi_state <= SPI_IDLE;
end
end
endcase
end
end
assign led[0] = spi_data_valid;
// LED驱动内部信号
reg [3:0] driver_pwm_counter; // PWM计数器 (0-15)
reg [2:0] driver_row_counter; // 行计数器 (0-7)
reg [3:0] current_row_r[7:0]; // 当前行R亮度数据 (32位)
reg [3:0] current_row_g[7:0]; // 当前行G亮度数据
reg [3:0] current_row_b[7:0]; // 当前行B亮度数据
reg [7:0] driver_col_r; // R列输出
reg [7:0] driver_col_g; // G列输出
reg [7:0] driver_col_b; // B列输出
// PWM计数器 (4位 16级)
always @(posedge clk_2048 or negedge rst) begin
if (!rst)
driver_pwm_counter <= 4'd0;
else
driver_pwm_counter <= driver_pwm_counter + 1;
end
// 行计数器
// 行选择译码器 (高有效)
reg [7:0] current_row;
// 亮度数据锁存 (行切换时更新)
integer col;
always @(posedge clk_2048 or negedge rst) begin
if (!rst) begin
for (col = 0; col < 8; col = col + 1) begin
current_row_r[col] <= 0;
current_row_r[col] <= 0;
current_row_r[col] <= 0;
end
current_row <= 8'h00;
driver_row_counter <= 3'd0;
end
else if (driver_pwm_counter == 4'hF) begin
current_row <= 8'h01 << driver_row_counter;
driver_row_counter <= driver_row_counter + 1;
case(driver_row_counter)
0: begin
for (col = 0; col < 8; col = col + 1) begin
current_row_r[col] <= red[col];
current_row_g[col] <= green[col];
current_row_b[col] <= blue[col];
end
end
1: begin
for (col = 0; col < 8; col = col + 1) begin
current_row_r[col] <= red[col+8];
current_row_g[col] <= green[col+8];
current_row_b[col] <= blue[col+8];
end
end
2: begin
for (col = 0; col < 8; col = col + 1) begin
current_row_r[col] <= red[col+16];
current_row_g[col] <= green[col+16];
current_row_b[col] <= blue[col+16];
end
end
3: begin
for (col = 0; col < 8; col = col + 1) begin
current_row_r[col] <= red[col+24];
current_row_g[col] <= green[col+24];
current_row_b[col] <= blue[col+24];
end
end
4: begin
for (col = 0; col < 8; col = col + 1) begin
current_row_r[col] <= red[col+32];
current_row_g[col] <= green[col+32];
current_row_b[col] <= blue[col+32];
end
end
5: begin
for (col = 0; col < 8; col = col + 1) begin
current_row_r[col] <= red[col+40];
current_row_g[col] <= green[col+40];
current_row_b[col] <= blue[col+40];
end
end
6: begin
for (col = 0; col < 8; col = col + 1) begin
current_row_r[col] <= red[col+48];
current_row_g[col] <= green[col+48];
current_row_b[col] <= blue[col+48];
end
end
7: begin
for (col = 0; col < 8; col = col + 1) begin
current_row_r[col] <= red[col+56];
current_row_g[col] <= green[col+56];
current_row_b[col] <= blue[col+56];
end
end
default: begin
for (col = 0; col < 8; col = col + 1) begin
current_row_r[col] <= 0;
current_row_g[col] <= 0;
current_row_b[col] <= 0;
end
end
endcase
end
end
// PWM输出生成 (修改为4位比较)
integer driver_col;
always @(posedge clk_2048 or negedge rst) begin
if (!rst) begin
driver_col_r <= 8'hFF;
driver_col_g <= 8'hFF;
driver_col_b <= 8'hFF;
end
else begin
for (driver_col = 0; driver_col < 8; driver_col = driver_col + 1) begin
// 使用PWM计数器的高4位进行比较
// 列比较 (低有效: 当颜色值 > PWM)
driver_col_r[driver_col] <= (current_row_r[driver_col] > driver_pwm_counter) ? 1'b0 : 1'b1;
driver_col_g[driver_col] <= (current_row_g[driver_col] > driver_pwm_counter) ? 1'b0 : 1'b1;
driver_col_b[driver_col] <= (current_row_b[driver_col] > driver_pwm_counter) ? 1'b0 : 1'b1;
end
end
end
// 输出列信号
assign led_col_r = driver_col_r;
assign led_col_g = driver_col_g;
assign led_col_b = driver_col_b;
assign led_row = current_row;
endmodule测试代码
`timescale 1ns / 1ps
module tb_led_matrix_top();
reg clk; // 系统时钟 (50MHz)
reg rst; // 异步复位 (低有效)
wire [7:0] led_row;
wire [7:0] led_col_r;
wire [7:0] led_col_g;
wire [7:0] led_col_b;
reg sclk; // SPI时钟
reg mosi; // SPI数据线
reg cs; // 片选
// 实例化待测设计
led_matrix_top dut (
.clk(clk),
.rst(rst),
.led_row(led_row),
.led_col_r(led_col_r),
.led_col_g(led_col_g),
.led_col_b(led_col_b),
.sclk(sclk),
.mosi(mosi),
.cs(cs)
);
// 时钟生成 (50MHz)
always #10 clk = ~clk; // 20ns周期 = 50MHz
// SPI发送任务
task spi_send;
input [31:0] data;
integer i;
begin
cs = 0; // 选中设备
#100; // 建立时间
// 发送32位数据 (MSB first)
for (i = 0; i < 32; i = i + 1) begin
sclk = 0;
mosi = data[31-i]; // 发送高位先
#50;
sclk = 1;
#50;
end
cs = 1; // 取消选中
sclk = 0;
#100_000; // 完成时间
end
endtask
// 修改:将4位颜色值左移4位(高4位有效)
function [23:0] get_led_color;
input [5:0] addr;
begin
get_led_color = {
dut.red[addr], 4'b0, // R: 高4位有效
dut.green[addr], 4'b0, // G: 高4位有效
dut.blue[addr], 4'b0 // B: 高4位有效
};
end
endfunction
// 循环变量声明
integer i, row;
integer on_count, total_count;
// 主测试流程
initial begin
// 初始化信号
clk = 0;
rst = 1; // 复位有效
sclk = 0;
mosi = 0;
cs = 1; // SPI未选中
#100;
// 测试1: 复位状态测试
rst = 0; // 保持复位
#200;
// 验证所有输出应为默认值(LED关闭)
if (led_col_r !== 8'hFF ||
led_col_g !== 8'hFF || led_col_b !== 8'hFF) begin
$display("错误:复位状态输出不正确");
$stop;
end
$display("测试1: 复位状态验证通过");
// 释放复位
rst = 1;
#1000;
// 测试2: SPI数据传输测试
spi_send(32'h00FF0000); // LED0: 红色全亮 -> 高4位取0xF
spi_send(32'h0100FF00); // LED1: 绿色全亮 -> 高4位取0xF
spi_send(32'h020000FF); // LED2: 蓝色全亮 -> 高4位取0xF
spi_send(32'h03FFFFFF); // LED3: 白色全亮 -> 高4位取0xF
spi_send(32'h04888888); // 修改:LED4: 50%亮度灰色 (0x8 -> 0x80)
// 验证存储器内容 (高4位有效)
if (get_led_color(0) !== 24'hF00000) begin // 修改:预期值高4位有效
$display("错误:LED0数据错误,预期24'hF00000,实际%h", get_led_color(0));
$stop;
end
if (get_led_color(1) !== 24'h00F000) begin // 修改:预期值高4位有效
$display("错误:LED1数据错误,预期24'h00F000,实际%h", get_led_color(1));
$stop;
end
if (get_led_color(3) !== 24'hF0F0F0) begin // 修改:预期值高4位有效
$display("错误:LED3数据错误,预期24'hF0F0F0,实际%h", get_led_color(3));
$stop;
end
if (get_led_color(4) !== 24'h808080) begin // 修改:预期50%亮度
$display("错误:LED4数据错误,预期24'h808080,实际%h", get_led_color(4));
$stop;
end
$display("测试2: SPI数据传输验证通过");
// 测试3: LED驱动功能测试
#10000; // 等待驱动开始工作
// 验证行扫描功能
$display("开始观察行扫描序列...");
for (row = 0; row < 8; row = row + 1) begin
// 等待行切换
wait (led_row === ~(1 << row));
$display("时间%t: 行%d选中", $time, row);
// 验证列输出
if (row == 0) begin
if (led_col_r[0] !== 1'b0 || // LED0红色
led_col_g[1] !== 1'b0 || // LED1绿色
led_col_b[2] !== 1'b0 || // LED2蓝色
(led_col_r[3] !== 1'b0 || // LED3白色
led_col_g[3] !== 1'b0 ||
led_col_b[3] !== 1'b0)) begin
$display("错误:第0行列输出不正确");
$display("R列: %b, G列: %b, B列: %b", led_col_r, led_col_g, led_col_b);
$stop;
end
end
#10000; // 等待部分PWM周期
end
// 测试4: PWM亮度控制测试
$display("观察PWM亮度控制...");
// 等待LED4(50%亮度)所在行
wait (dut.driver_row_counter == 3'd4); // LED4在第4行
#1000;
// 统计LED4的亮灭时间(应为约50%占空比)
on_count = 0;
total_count = 0;
for (i = 0; i < 1000; i = i + 1) begin
// 修改:同时检查RGB三通道
if (led_col_r[4] === 1'b0 ||
led_col_g[4] === 1'b0 ||
led_col_b[4] === 1'b0) begin
on_count = on_count + 1;
end
total_count = total_count + 1;
#100;
end
// 计算并显示点亮率
$display("LED4亮度统计: 点亮率%0.1f%%", (on_count*100.0)/total_count);
// 验证占空比是否接近50%(±5%容差)
if ((on_count*100)/total_count < 45 || (on_count*100)/total_count > 55) begin
$display("错误:LED4亮度异常,预期50%%,实际%0.1f%%",
(on_count*100.0)/total_count);
$stop;
end
$display("所有测试通过!");
$finish;
end
// 波形记录
initial begin
$dumpfile("tb_led_matrix_top.vcd");
$dumpvars(0, tb_led_matrix_top);
#1_000_000 $finish; // 设置最大仿真时间
end
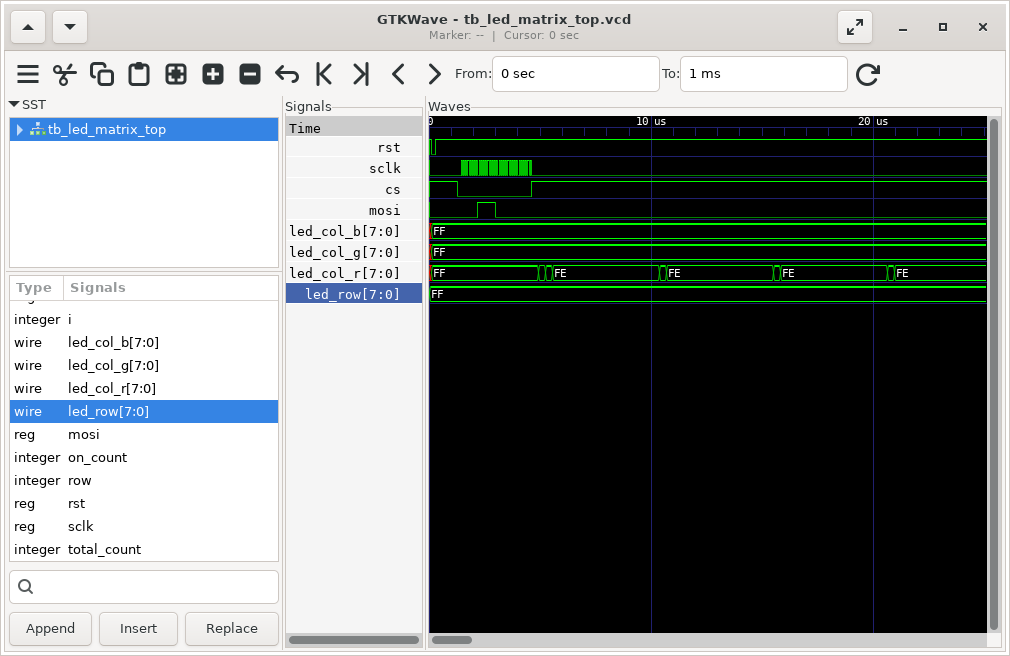
endmodule仿真结果
上位机程序
利用CH340作为USB转SPI接口
呼吸灯程序
import serial
import time
import math
# 配置串口参数
PORT = 'COM9' # Windows系统示例(如:COM3),Linux/macOS示例:'/dev/ttyUSB0'
BAUDRATE = 460800 # 波特率(根据设备要求调整)
TIMEOUT = 1 # 超时时间(秒)
# 创建命令的函数
def create_led_command(addr, red, green, blue):
red = int(red/3)
green = int(green/2)
blue = int(blue)
header = bytes.fromhex('55 AA 0C 00 04 04')
addr_byte = addr.to_bytes(1, 'big')
# 颜色值:每个1字节
red_byte = red.to_bytes(1, 'big')
green_byte = green.to_bytes(1, 'big')
blue_byte = blue.to_bytes(1, 'big')
tail = bytes.fromhex('00 5A')
return header + addr_byte + red_byte + green_byte + blue_byte + tail
try:
# 打开串口
with serial.Serial(port=PORT, baudrate=BAUDRATE,
bytesize=serial.EIGHTBITS,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
timeout=TIMEOUT) as ser:
print(f"已连接串口: {ser.name}")
# 呼吸灯参数
brightness = 0
step = 1 # 亮度变化步长
duration = 0.02 # 每帧持续时间(秒)
while True:
# 计算当前亮度值(使用正弦函数实现平滑变化)
# 将亮度范围映射到0-255,使用正弦函数实现平滑呼吸效果
brightness = int(127 + 127 * math.sin(time.time() * 1.5))
# 为所有64个LED设置相同的亮度
for addr in range(64): # 8x8阵列共有64个LED
# 创建RGB命令 - 白色呼吸灯(所有颜色通道相同)
tx_data = bytes.fromhex('55 AA 09 00 03 00 00 00 5A') # 主模式下 N SS 引脚高低电平控制控制
ser.write(tx_data)
cmd = create_led_command(addr, brightness, brightness, brightness)
ser.write(cmd)
tx_data = bytes.fromhex('55 AA 09 00 03 00 01 00 5A') # 主模式下 N SS 引脚高低电平控制控制
ser.write(tx_data)
# 控制刷新率
time.sleep(duration)
except serial.SerialException as e:
print(f"串口错误: {e}")
except KeyboardInterrupt:
print("程序被用户中断")
except Exception as e:
print(f"发生错误: {e}")LED控制程序
import serial
import time
import numpy as np
import tkinter as tk
from tkinter import ttk, messagebox
from threading import Thread, Event
class LEDControlApp:
def __init__(self, root):
self.root = root
self.root.title("8x8 LED阵列控制程序")
self.root.geometry("900x700")
self.root.resizable(True, True)
# 初始化变量
self.serial_port = None
self.running = Event()
self.animation_speed = 0.1 # 默认动画速度(秒)
# 创建UI
self.create_widgets()
# 自动查找可用串口
self.find_serial_ports()
# 创建LED矩阵显示
self.create_led_matrix()
def create_widgets(self):
# 串口控制面板
port_frame = ttk.LabelFrame(self.root, text="串口设置")
port_frame.pack(fill=tk.X, padx=10, pady=5)
ttk.Label(port_frame, text="选择串口:").grid(row=0, column=0, padx=5, pady=5)
self.port_combo = ttk.Combobox(port_frame, width=15)
self.port_combo.grid(row=0, column=1, padx=5, pady=5)
ttk.Label(port_frame, text="波特率:").grid(row=0, column=2, padx=5, pady=5)
self.baud_combo = ttk.Combobox(port_frame, width=10, values=["9600", "19200", "38400", "57600", "115200", "460800"])
self.baud_combo.set("460800")
self.baud_combo.grid(row=0, column=3, padx=5, pady=5)
self.connect_btn = ttk.Button(port_frame, text="连接", command=self.toggle_connection)
self.connect_btn.grid(row=0, column=4, padx=5, pady=5)
# 控制面板
control_frame = ttk.LabelFrame(self.root, text="LED控制")
control_frame.pack(fill=tk.X, padx=10, pady=5)
ttk.Label(control_frame, text="动画速度 (秒):").grid(row=0, column=0, padx=5, pady=5)
self.speed_scale = ttk.Scale(control_frame, from_=0.01, to=1.0, length=200,
command=lambda v: setattr(self, 'animation_speed', float(v)))
self.speed_scale.set(0.1)
self.speed_scale.grid(row=0, column=1, padx=5, pady=5)
self.speed_label = ttk.Label(control_frame, text=f"当前速度: {self.animation_speed:.2f}s")
self.speed_label.grid(row=0, column=2, padx=5, pady=5)
ttk.Button(control_frame, text="逐一点亮", command=self.start_sequential).grid(row=0, column=3, padx=5, pady=5)
ttk.Button(control_frame, text="全部点亮", command=self.all_on).grid(row=0, column=4, padx=5, pady=5)
ttk.Button(control_frame, text="全部关闭", command=self.all_off).grid(row=0, column=5, padx=5, pady=5)
# 颜色控制
color_frame = ttk.LabelFrame(self.root, text="LED颜色控制")
color_frame.pack(fill=tk.X, padx=10, pady=5)
ttk.Label(color_frame, text="红色 (R):").grid(row=0, column=0, padx=5, pady=5)
self.r_slider = ttk.Scale(color_frame, from_=0, to=255, length=200,
command=lambda v: self.update_color_preview())
self.r_slider.set(255)
self.r_slider.grid(row=0, column=1, padx=5, pady=5)
ttk.Label(color_frame, text="绿色 (G):").grid(row=1, column=0, padx=5, pady=5)
self.g_slider = ttk.Scale(color_frame, from_=0, to=255, length=200,
command=lambda v: self.update_color_preview())
self.g_slider.set(255)
self.g_slider.grid(row=1, column=1, padx=5, pady=5)
ttk.Label(color_frame, text="蓝色 (B):").grid(row=2, column=0, padx=5, pady=5)
self.b_slider = ttk.Scale(color_frame, from_=0, to=255, length=200,
command=lambda v: self.update_color_preview())
self.b_slider.set(255)
self.b_slider.grid(row=2, column=1, padx=5, pady=5)
self.color_preview = tk.Canvas(color_frame, width=50, height=50, bg="#FFFFFF")
self.color_preview.grid(row=0, column=2, rowspan=3, padx=10, pady=5)
# 状态栏
self.status_var = tk.StringVar(value="就绪")
status_bar = ttk.Label(self.root, textvariable=self.status_var, relief=tk.SUNKEN, anchor=tk.W)
status_bar.pack(side=tk.BOTTOM, fill=tk.X)
def create_led_matrix(self):
# 创建LED矩阵显示
matrix_frame = ttk.LabelFrame(self.root, text="8x8 LED阵列")
matrix_frame.pack(fill=tk.BOTH, expand=True, padx=10, pady=5)
self.led_canvas = tk.Canvas(matrix_frame, width=600, height=600, bg="#222222")
self.led_canvas.pack(fill=tk.BOTH, expand=True, padx=10, pady=10)
# 创建64个LED的表示
self.leds = []
led_size = 60
spacing = 70
start_x = 30
start_y = 30
for i in range(8):
for j in range(8):
x1 = start_x + j * spacing
y1 = start_y + i * spacing
x2 = x1 + led_size
y2 = y1 + led_size
led_id = self.led_canvas.create_oval(x1, y1, x2, y2, fill="#333333", outline="#555555", width=2)
self.leds.append({
'id': led_id,
'state': 0,
'color': (0, 0, 0)
})
# 添加LED编号标签
self.led_canvas.create_text(x1 + led_size/2, y1 + led_size/2,
text=str(i*8 + j), fill="white", font=("Arial", 10))
def find_serial_ports(self):
"""查找可用的串口"""
ports = []
for i in range(1, 21):
port_name = f"COM{i}" # Windows
ports.append(port_name)
# 对于Linux/Mac,可以添加类似 '/dev/ttyUSB0' 等
self.port_combo['values'] = ports
if ports:
self.port_combo.current(0)
def toggle_connection(self):
"""连接或断开串口"""
if self.serial_port and self.serial_port.is_open:
self.disconnect_serial()
self.connect_btn.config(text="连接")
self.status_var.set("已断开连接")
else:
self.connect_serial()
def connect_serial(self):
"""连接串口"""
port = self.port_combo.get()
baud = int(self.baud_combo.get())
if not port:
messagebox.showerror("错误", "请选择串口")
return
try:
self.serial_port = serial.Serial(
port=port,
baudrate=baud,
bytesize=serial.EIGHTBITS,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
timeout=1
)
self.connect_btn.config(text="断开连接")
self.status_var.set(f"已连接到 {port} @ {baud} bps")
except Exception as e:
messagebox.showerror("连接错误", f"无法连接到串口: {str(e)}")
def disconnect_serial(self):
"""断开串口连接"""
if self.serial_port and self.serial_port.is_open:
self.running.clear() # 停止任何正在运行的动画
try:
self.serial_port.close()
except:
pass
self.serial_port = None
def send_led_data(self, led_address, r, g, b):
"""
发送单个LED数据包(4个字节)
格式: [地址(8位) | R(8位) | G(8位) | B(8位)]
"""
if self.serial_port and self.serial_port.is_open:
try:
# 构造数据包
packet = bytes([
led_address & 0xFF, # 地址字节 (0-63)
int(r*0.5) & 0xFF, # 红色分量
int(g*0.75) & 0xFF, # 绿色分量
int(b) & 0xFF # 蓝色分量
])
# 发送数据
# self.serial_port.write(packet)
tx_data = bytes.fromhex('55 AA 09 00 03 00 00 00 5A') # 主模式下 N SS 引脚高低电平控制控制
self.serial_port.write(tx_data)
header = bytes.fromhex('55 AA 0C 00 04 04')
tail = bytes.fromhex('00 5A')
tx_data = header + packet + tail
self.serial_port.write(tx_data)
tx_data = bytes.fromhex('55 AA 09 00 03 00 01 00 5A') # 主模式下 N SS 引脚高低电平控制控制
self.serial_port.write(tx_data)
# 更新UI上的LED状态
self.update_led_ui(led_address, r, g, b)
except Exception as e:
self.status_var.set(f"发送错误: {str(e)}")
def update_led_ui(self, address, r, g, b):
"""更新UI上的LED显示"""
if 0 <= address < 64:
# 将RGB值转换为十六进制颜色代码
color_hex = f"#{r:02x}{g:02x}{b:02x}"
led_info = self.leds[address]
# 更新画布上的LED颜色
self.led_canvas.itemconfig(led_info['id'], fill=color_hex)
# 更新状态
led_info['state'] = 1 if (r > 0 or g > 0 or b > 0) else 0
led_info['color'] = (r, g, b)
def update_color_preview(self):
"""更新颜色预览框"""
r = int(self.r_slider.get())
g = int(self.g_slider.get())
b = int(self.b_slider.get())
color_hex = f"#{r:02x}{g:02x}{b:02x}"
self.color_preview.config(bg=color_hex)
def get_current_color(self):
"""获取当前选择的颜色"""
r = int(self.r_slider.get())
g = int(self.g_slider.get())
b = int(self.b_slider.get())
return r, g, b
def start_sequential(self):
"""开始逐一点亮LED"""
if not self.serial_port or not self.serial_port.is_open:
messagebox.showerror("错误", "请先连接串口")
return
if self.running.is_set():
self.running.clear()
return
# 使用线程运行动画
self.running.set()
Thread(target=self.animate_sequential, daemon=True).start()
def animate_sequential(self):
"""动画线程:逐一点亮LED"""
r, g, b = self.get_current_color()
try:
# 先关闭所有LED
self.all_off()
# 逐一点亮每个LED
for led in range(64):
if not self.running.is_set():
break
# 发送LED控制命令
self.send_led_data(led, r, g, b)
# 更新状态栏
self.status_var.set(f"点亮LED #{led}")
# 等待
time.sleep(self.animation_speed)
# 如果动画完成,重新设置状态
if self.running.is_set():
self.status_var.set("LED点亮动画完成")
self.running.clear()
except Exception as e:
self.status_var.set(f"动画错误: {str(e)}")
self.running.clear()
def all_on(self):
"""点亮所有LED"""
r, g, b = self.get_current_color()
for led in range(64):
self.send_led_data(led, r, g, b)
self.status_var.set("所有LED已点亮")
def all_off(self):
"""关闭所有LED"""
for led in range(64):
self.send_led_data(led, 0, 0, 0)
self.status_var.set("所有LED已关闭")
def on_closing(self):
"""关闭窗口时清理资源"""
self.running.clear() # 停止动画
self.disconnect_serial() # 断开串口
self.root.destroy()
if __name__ == "__main__":
root = tk.Tk()
app = LEDControlApp(root)
root.protocol("WM_DELETE_WINDOW", app.on_closing)
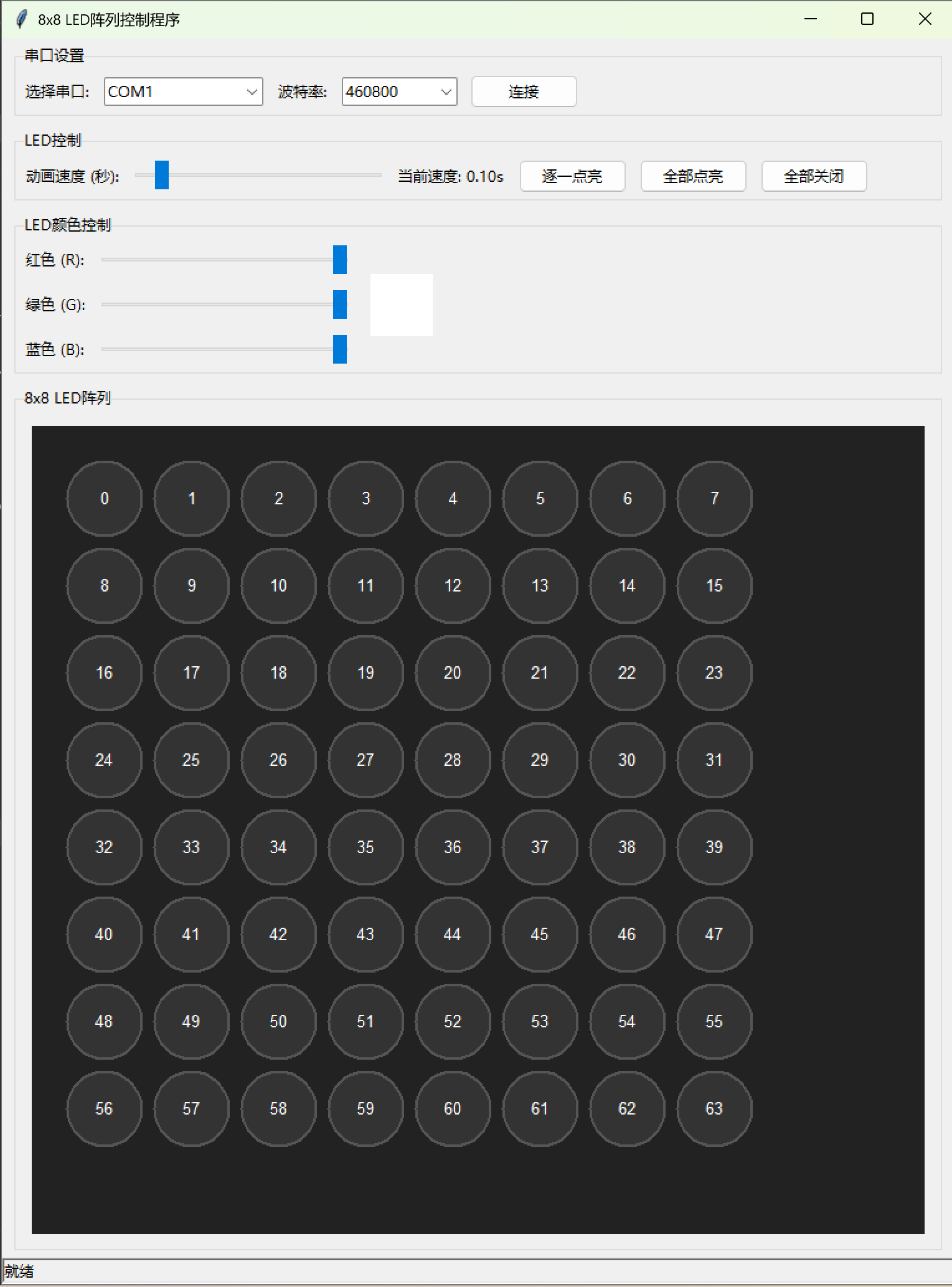
root.mainloop()软件界面
康威生命游戏 LED 阵列控制器
项目概述
这是一个结合了康威生命游戏模拟和8x8 RGB LED阵列控制的软件系统。它能够在计算机屏幕上可视化生命游戏的演变过程,同时通过串口将游戏状态实时传输到物理LED阵列上显示。
主要功能
🕹️ 核心功能
- 康威生命游戏模拟:
- 实现经典的康威生命游戏规则
- 支持8x8网格上的细胞演化
- 提供多种预设模式:随机、滑翔机、闪烁和脉冲星
💡 LED阵列控制
- 硬件集成:
- 通过串口与物理LED阵列通信
- 实时将游戏状态映射到LED显示
- 支持自定义LED颜色映射(活细胞渐变,死细胞熄灭)
🖥️ 可视化界面
- 交互式模拟:
- 精美的Pygame可视化界面
- 细胞发光效果和LED点阵模拟
- 实时显示代数统计和细胞数量
技术架构
关键组件
游戏逻辑模块:
- 基于NumPy的高效网格计算
- 环形边界条件实现
- 自动重生机制(当所有细胞死亡时)
硬件控制模块:
- PySerial库实现串口通信
- 自定义LED命令协议
- 行优先地址映射(地址 = 行号 × 8 + 列号)
可视化模块:
- Pygame图形界面
- 细胞年龄颜色渐变(绿→蓝)
- 发光效果和LED点阵模拟
安装与使用
系统要求
- Python 3.7+
- 依赖库:
pygame,numpy,pyserial
安装步骤
# 安装依赖库
pip install pygame numpy pyserial
# 克隆仓库
git clone https://github.com/zhouxzh/FPGA-course
cd FPGA-course/LED_matrix/python
# 运行程序
python led_game.py硬件连接
- 将8x8 LED阵列连接到计算机
- 修改程序中的串口配置:
PORT = 'COM9' # Windows # PORT = '/dev/ttyUSB0' # Linux/macOS BAUDRATE = 460800
操作指南
| 按键 | 功能 |
|---|---|
| 空格 | 暂停/继续游戏 |
| R | 随机模式 |
| G | 滑翔机模式 |
| B | 闪烁模式 |
| P | 脉冲星模式 |
| C | 清空网格 |
| 鼠标点击 | 切换细胞状态(暂停时) |
应用场景
教育演示:
- 生动展示康威生命游戏原理
- 将抽象概念转化为直观的视觉体验
艺术装置:
- 创建动态LED艺术展示
- 结合算法生成艺术的物理实现
硬件开发:
- LED阵列控制参考实现
- 串口通信协议示例
科学可视化:
- 复杂系统演化的微型展示
- 细胞自动机的物理实现
设计亮点
软硬件无缝集成:
- 虚拟模拟与实际硬件显示同步
- 自动适应串口连接状态(有硬件时控制LED,无硬件时纯模拟)
高效渲染:
- 基于NumPy的矩阵运算加速游戏更新
- Pygame的硬件加速渲染
用户体验优化:
- 直观的控制面板和状态显示
- 细胞发光效果增强视觉体验
- 详细的屏幕提示和操作指南
可扩展架构:
- 模块化设计便于功能扩展
- 支持自定义初始模式和规则
项目意义
这个项目将数学理论(细胞自动机)、计算机科学(算法实现)和电子工程(硬件控制)完美融合,展示了:
- 复杂系统在受限环境中的表现
- 抽象概念的物理可视化
- 跨学科知识的综合应用
通过这个项目,用户可以:
- 深入理解康威生命游戏的原理
- 学习串口通信和硬件控制
- 探索生成艺术的可能性
- 体验算法与物理世界的互动
未来扩展
更多游戏模式:
- 添加其他细胞自动机规则
- 支持用户自定义规则
高级硬件功能:
- 亮度调节
- 动画过渡效果
- 多设备同步控制
网络功能:
- 远程控制接口
- 多用户协作模式
- 状态共享和保存
移动应用:
- 手机控制端
- 增强现实(AR)可视化
获取代码
项目代码已开源: GitHub仓库链接
欢迎贡献代码、报告问题和提出改进建议!
python源码
import serial
import time
import numpy as np
import random
import pygame
from pygame.locals import *
import math
import sys
# 配置串口参数
PORT = 'COM9' # Windows系统示例(如:COM3),Linux/macOS示例:'/dev/ttyUSB0'
BAUDRATE = 460800 # 波特率(根据设备要求调整)
TIMEOUT = 1 # 超时时间(秒)
# 初始化常量
GRID_SIZE = 8
CELL_SIZE = 80
WINDOW_SIZE = GRID_SIZE * CELL_SIZE
FPS = 10 # 控制游戏速度
# 颜色定义 (RGB)
BACKGROUND = (15, 15, 30)
GRID_COLOR = (30, 30, 60)
ALIVE_COLORS = [
(0, 255, 100), # 新生细胞 - 亮绿色
(50, 200, 150), # 成熟细胞
(100, 180, 255), # 稳定细胞 - 淡蓝色
]
DEAD_COLOR = (10, 10, 20)
# 创建命令的函数
def create_led_command(addr, red, green, blue):
red = int(red/3)
green = int(green/2)
blue = int(blue)
header = bytes.fromhex('55 AA 0C 00 04 04')
addr_byte = addr.to_bytes(1, 'big')
# 颜色值:每个1字节
red_byte = red.to_bytes(1, 'big')
green_byte = green.to_bytes(1, 'big')
blue_byte = blue.to_bytes(1, 'big')
tail = bytes.fromhex('00 5A')
return header + addr_byte + red_byte + green_byte + blue_byte + tail
def send_grid_to_leds(ser, grid):
"""将网格状态发送到LED阵列"""
for x in range(GRID_SIZE):
for y in range(GRID_SIZE):
addr = x * GRID_SIZE + y # 计算LED地址(行优先)
if grid[x][y] > 0: # 活细胞
# 活细胞根据年龄选择颜色
color_idx = min(grid[x][y] - 1, len(ALIVE_COLORS) - 1)
r, g, b = ALIVE_COLORS[color_idx]
else: # 死细胞
r, g, b = 0, 0, 0
# 发送控制命令
tx_data = bytes.fromhex('55 AA 09 00 03 00 00 00 5A') # 片选低
ser.write(tx_data)
# 创建并发送LED命令
cmd = create_led_command(addr, r, g, b)
ser.write(cmd)
tx_data = bytes.fromhex('55 AA 09 00 03 00 01 00 5A') # 片选高
ser.write(tx_data)
class GameOfLife:
def __init__(self, grid_size):
self.grid_size = grid_size
self.grid = np.zeros((grid_size, grid_size), dtype=int)
self.generation = 0
self.initialize_grid()
def initialize_grid(self, pattern=None):
"""初始化网格,可以指定模式或随机"""
self.grid = np.zeros((self.grid_size, self.grid_size), dtype=int)
self.generation = 0
if pattern == "random":
# 随机模式
self.grid = np.random.choice([0, 1], size=(self.grid_size, self.grid_size))
elif pattern == "glider":
# 滑翔机模式
self.grid[1][2] = 1
self.grid[2][3] = 1
self.grid[3][1] = 1
self.grid[3][2] = 1
self.grid[3][3] = 1
elif pattern == "blinker":
# 闪烁模式
self.grid[3][3] = 1
self.grid[3][4] = 1
self.grid[3][5] = 1
elif pattern == "pulsar":
# 脉冲星模式 (简化版)
coords = [(1,4), (1,5), (1,6),
(2,4), (2,6),
(4,1), (4,2), (4,3), (4,5), (4,6), (4,7),
(5,1), (5,3), (5,5), (5,7),
(6,1), (6,2), (6,3), (6,5), (6,6), (6,7)]
for x, y in coords:
self.grid[x][y] = 1
else:
# 默认随机模式
self.grid = np.random.choice([0, 1], size=(self.grid_size, self.grid_size))
def count_neighbors(self, x, y):
"""计算给定位置周围的活细胞数量(使用环形边界)"""
count = 0
for i in range(-1, 2):
for j in range(-1, 2):
if i == 0 and j == 0:
continue
# 使用模运算实现环形边界
xi = (x + i) % self.grid_size
yj = (y + j) % self.grid_size
count += self.grid[xi][yj]
return count
def update(self):
"""更新到下一代"""
new_grid = self.grid.copy()
for x in range(self.grid_size):
for y in range(self.grid_size):
neighbors = self.count_neighbors(x, y)
# 应用康威生命游戏规则
if self.grid[x][y] == 1: # 活细胞
if neighbors < 2 or neighbors > 3:
new_grid[x][y] = 0 # 死亡
else:
# 活细胞根据年龄显示不同颜色
new_grid[x][y] = min(self.grid[x][y] + 1, len(ALIVE_COLORS))
else: # 死细胞
if neighbors == 3:
new_grid[x][y] = 1 # 新生
self.grid = new_grid
self.generation += 1
# 如果所有细胞都死亡,重新初始化
if np.sum(self.grid) == 0:
self.initialize_grid("random")
def draw_grid(screen, game):
"""绘制游戏网格"""
for x in range(GRID_SIZE):
for y in range(GRID_SIZE):
rect = pygame.Rect(y * CELL_SIZE, x * CELL_SIZE, CELL_SIZE, CELL_SIZE)
# 绘制细胞
if game.grid[x][y] > 0:
# 活细胞根据年龄选择颜色
color_idx = min(game.grid[x][y] - 1, len(ALIVE_COLORS) - 1)
color = ALIVE_COLORS[color_idx]
pygame.draw.rect(screen, color, rect)
# 添加发光效果
glow_rect = rect.inflate(-10, -10)
pygame.draw.rect(screen, (min(color[0]+100, 255), min(color[1]+100, 255), min(color[2]+100, 255)), glow_rect)
else:
pygame.draw.rect(screen, DEAD_COLOR, rect)
# 绘制网格线
pygame.draw.rect(screen, GRID_COLOR, rect, 1)
# 添加LED点阵效果
for x in range(GRID_SIZE):
for y in range(GRID_SIZE):
center = (y * CELL_SIZE + CELL_SIZE // 2, x * CELL_SIZE + CELL_SIZE // 2)
pygame.draw.circle(screen, (30, 30, 60), center, 2)
def draw_info(screen, game):
"""绘制游戏信息"""
font = pygame.font.SysFont(None, 24)
# 显示代数
gen_text = font.render(f"Generation: {game.generation}", True, (200, 200, 255))
screen.blit(gen_text, (10, 10))
# 显示细胞数量
cells = np.sum(game.grid)
cells_text = font.render(f"Cells: {cells}", True, (200, 200, 255))
screen.blit(cells_text, (WINDOW_SIZE - 120, 10))
# 显示控制说明
controls = [
"Controls:",
"R - Random pattern",
"G - Glider pattern",
"B - Blinker pattern",
"P - Pulsar pattern",
"Space - Pause/Resume",
"C - Clear grid",
"Click - Toggle cells"
]
for i, text in enumerate(controls):
ctrl_text = font.render(text, True, (180, 180, 220))
screen.blit(ctrl_text, (10, WINDOW_SIZE - 150 + i * 25))
def main():
# 初始化Pygame
pygame.init()
screen = pygame.display.set_mode((WINDOW_SIZE, WINDOW_SIZE))
pygame.display.set_caption("康威生命游戏 - 8x8 LED阵列模拟")
clock = pygame.time.Clock()
# 创建游戏实例
game = GameOfLife(GRID_SIZE)
paused = False
# 尝试打开串口
ser = None
try:
ser = serial.Serial(port=PORT, baudrate=BAUDRATE,
bytesize=serial.EIGHTBITS,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
timeout=TIMEOUT)
print(f"已连接串口: {ser.name}")
except serial.SerialException as e:
print(f"无法打开串口: {e}")
print("将在模拟模式下运行,不连接实际硬件")
# 主游戏循环
running = True
while running:
for event in pygame.event.get():
if event.type == QUIT:
running = False
elif event.type == KEYDOWN:
if event.key == K_SPACE:
paused = not paused
elif event.key == K_r:
game.initialize_grid("random")
if ser: send_grid_to_leds(ser, game.grid)
elif event.key == K_g:
game.initialize_grid("glider")
if ser: send_grid_to_leds(ser, game.grid)
elif event.key == K_b:
game.initialize_grid("blinker")
if ser: send_grid_to_leds(ser, game.grid)
elif event.key == K_p:
game.initialize_grid("pulsar")
if ser: send_grid_to_leds(ser, game.grid)
elif event.key == K_c:
game.initialize_grid()
if ser: send_grid_to_leds(ser, game.grid)
elif event.type == MOUSEBUTTONDOWN and paused:
# 在暂停时允许手动切换细胞状态
x, y = pygame.mouse.get_pos()
grid_x = y // CELL_SIZE
grid_y = x // CELL_SIZE
if 0 <= grid_x < GRID_SIZE and 0 <= grid_y < GRID_SIZE:
game.grid[grid_x][grid_y] = 1 if game.grid[grid_x][grid_y] == 0 else 0
if ser: send_grid_to_leds(ser, game.grid)
# 更新游戏状态
if not paused:
game.update()
# 将更新后的网格发送到LED
if ser: send_grid_to_leds(ser, game.grid)
# 绘制
screen.fill(BACKGROUND)
draw_grid(screen, game)
draw_info(screen, game)
# 显示暂停状态
if paused:
font = pygame.font.SysFont(None, 48)
pause_text = font.render("PAUSED", True, (255, 100, 100))
screen.blit(pause_text, (WINDOW_SIZE // 2 - 70, WINDOW_SIZE // 2 - 24))
pygame.display.flip()
clock.tick(FPS)
# 关闭串口
if ser:
ser.close()
pygame.quit()
sys.exit()
if __name__ == "__main__":
main()软件界面
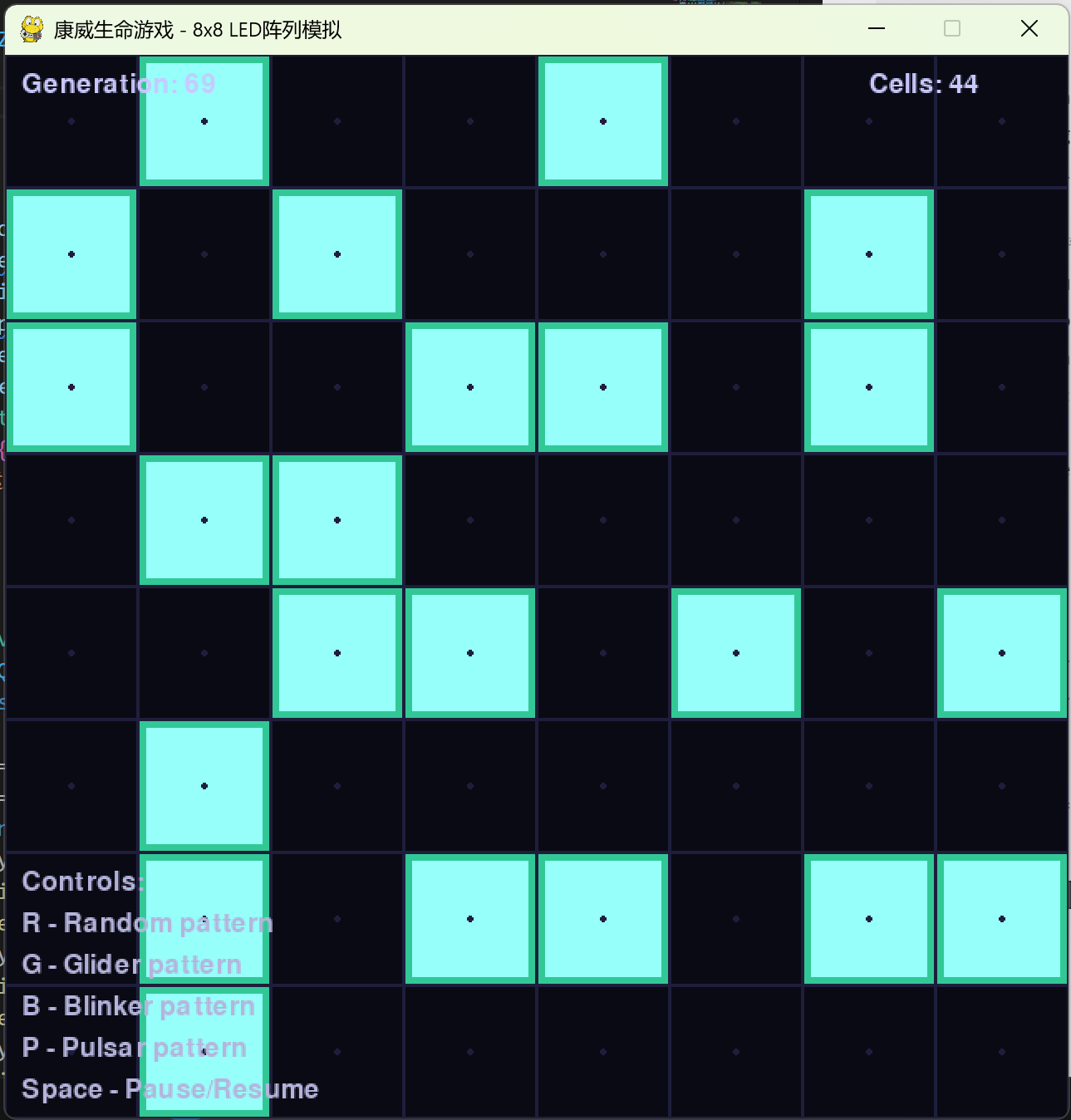
系统运行结果