PS端"Hello World"实验
PS端"Hello World"实验
本实验 Vivado 工程命名为 ps_hello。本章起软件工程师与 FPGA 工程师需协同完成。前述实验均在 PL 端完成,与传统 FPGA 开发流程一致。Zynq 的核心优势在于将 FPGA 与 ARM 处理子系统(PS)整合,因而对协同设计提出了更高要求。本章通过串口打印示例,介绍基于 PS 的裸机(bare-metal)开发流程、Vivado 中的 PS 配置以及在 SDK 中的应用开发与启动镜像制作。
职责分工
FPGA 工程师需在 Vivado 中搭建硬件设计,配置 PS,导出硬件描述文件(HDF/HDF),并提供比特流(如需要),以供软件开发使用。软件工程师在 SDK 中基于导出的硬件平台开发应用程序与引导程序(FSBL),并完成启动镜像(BOOT.bin)的生成与部署。两类角色的协作可显著提升开发效率,使硬件与软件在系统层面达到一致的运行状态。
PS 与 PL 的关系与硬件准备
Zynq 器件包含 PS 与 PL 两大部分。PS 端的 MIO 引脚为固定资源,其功能通过 PS 配置而定;因此 PS 引脚不应在 PL 中重新绑定。尽管本实验以 PS 功能为主,仍需建立 Vivado 工程以配置 PS 并导出硬件平台供软件使用。
Vivado 中的硬件设计流程(关键步骤摘要)
创建 Vivado 工程并新建 Block Design(示例 design_1),通过图形化方式将 Zynq 处理系统(processing_system7)添加到设计中。配置处理系统:进入 PS 配置界面,按照原理图与开发板实际连线配置 MIO 外设映射(例如 UART、QSPI、Ethernet、USB、SD、GPIO 等);注意同一组 MIO 可复用多种功能,最终配置应与板级原理图一致。时钟与 DDR 配置:在 Clock Configuration 中检验 PS 时钟设置;在 DDR Configuration 中根据板卡规格选择合适的 DDR 参数与总线宽度。运行 Block Automation 以导出 PS 引脚与固定 I/O(FIXED_IO)、DDR 接口等必要端口,并保存设计。生成 HDL wrapper 与 Generate Output Products,以便生成包含 PS 配置的 XDC 与输出文件。导出硬件(File → Export → Export Hardware),根据需要选择是否包含 bitstream;导出后会生成用于 SDK 的 HDF 文件及相应目录。范例界面与配置说明见文档内插图(原理图与配置界面)。
开发模式转型
本实验工程名为 ps_hello,采用 FPGA 工程师与软件工程师协同开发的模式。在传统工作流中,PL 端开发由 FPGA 工程师独立负责,侧重 RTL 设计、综合与实现;而在 Zynq 平台上,开发流程转变为软硬件协同,FPGA 工程师需先搭建并导出硬件平台,软件工程师基于该硬件平台开展裸机或操作系统应用开发与调试。通过并行推进硬件配置与软件实现,团队能够更快速地进行系统集成验证并定位问题,从而提升开发效率与交付质量。
硬件平台搭建
在硬件平台搭建方面,Vivado 工程初始化需要明确工程名称和目标器件,本项目建议工程名为 ps_hello,目标开发板选择 XC7Z020CLG400-1。Block Design 的创建流程通常包括将 Zynq IP 添加到设计中、运行 Block Automation 并生成 HDL wrapper。创建流程应与板级原理图保持一致,尤其是 MIO 引脚映射、时钟输入与 DDR 配置等,以保证导出的硬件平台(HDF/HDF)能被软件团队直接使用。
在 Zynq 核配置上,应重点关注 PS‑PL 接口(如 AXI 总线)、外设引脚分配(例如 UART、Ethernet、USB 等)、时钟树设计以及 DDR 参数设置。正确的 PS MIO 复用配置必须与 PCB 原理图一一对应,DDR 的总线宽度和时序参数要与实际器件匹配,避免因配置不当导致启动或存储访问失败。
关于 PS 端外设的规范配置,UART1 常映射到 MIO48–MIO49,使用 115200 波特率并与软件端配置一致;Bank 的电平需依据原理图设定(某些 Bank 可能要求 1.8V),否则会造成外设不可用或硬件损坏。对于 DDR,下面示例 JSON 描述可作为参数参考,用于在 Vivado 的 DDR 配置向导或文档中核对器件型号与时序档案。
{
"Memory Type": "DDR3",
"Part Number": "MT41J256M16 RE-125",
"Bus Width": "32 Bit",
"Clock Freq": "533.333 MHz",
"Timing Profile": "DDR3_1066F"
}时钟配置方面,主时钟输入通常为板载 33.333 MHz 晶振,CPU 的目标频率可设为 666.666 MHz(默认值),而 PL 时钟供给可视设计需求由 PS 或 Clocking Wizard 提供。务必在导出硬件平台前完成时钟树校验,确保所有关键时钟源稳定且在时序分析范围内。
在交付给软件团队前的关键验证点包括:硬件工程师需确认 PS 端 Bank 的电压设置正确、UART 引脚分配与原理图一致、所选 DDR 型号在兼容列表中并配置恰当,以及以太网 PHY 的时钟/电平设置(例如 HSTL 1.8V);软件工程师则需准备 SDK 工程、配置 FSBL 并验证串口打印驱动以便能通过串口观察启动日志。
版本控制与协同建议
为了便于团队协同开发,建议在完成 PL 基础开发后建立专门的分支用于 PS 配置与优化工作,软件团队在硬件平台稳定后可基于该分支开展 SDK 开发并在验证通过后合并回主干。下列 git 工作流示意展示了常见的分支与合并流程,有助于保持硬件与软件交付的一致性。
附录:常用命令速查
为了便于在命令行或脚本中执行常用操作,下面列出若干 Vivado 快捷命令示例,适合用于流水线脚本或手工执行以提高重复操作效率。示例包括生成 HDL 封装器、验证 Block Design 完整性以及生成比特流的命令,可根据需要嵌入到自动化脚本或文档中。
# 生成HDL封装器
generate_target all [get_files *.bd]
# 验证设计完整性
validate_bd_design
# 生成比特流文件
launch_runs impl_1 -to_step write_bitstreamPS 外设配置要点(摘要)
根据原理图定位 UART 所在 MIO,例如 UART1 在 MIO48–MIO49,应启用相应串口并为所属 Bank 设置正确的电平标准(例如 3.3V 或 1.8V),否则可能导致外设无法正常工作。配置 QSPI(若用于启动),选择合适的 IO 模式与片选配置;如需 SD 启动,则配置对应 SD 控制器及 Card Detect 引脚。配置以太网、MDIO、USB 与所需的 GPIO,引脚复用需与 PCB/原理图一致。在完成 PS 配置后运行自动化步骤以导出必需接口,并将 FCLK 与 AXI 时钟连接好以供 PL 使用(如需)。
软件开发与调试(SDK 流程)
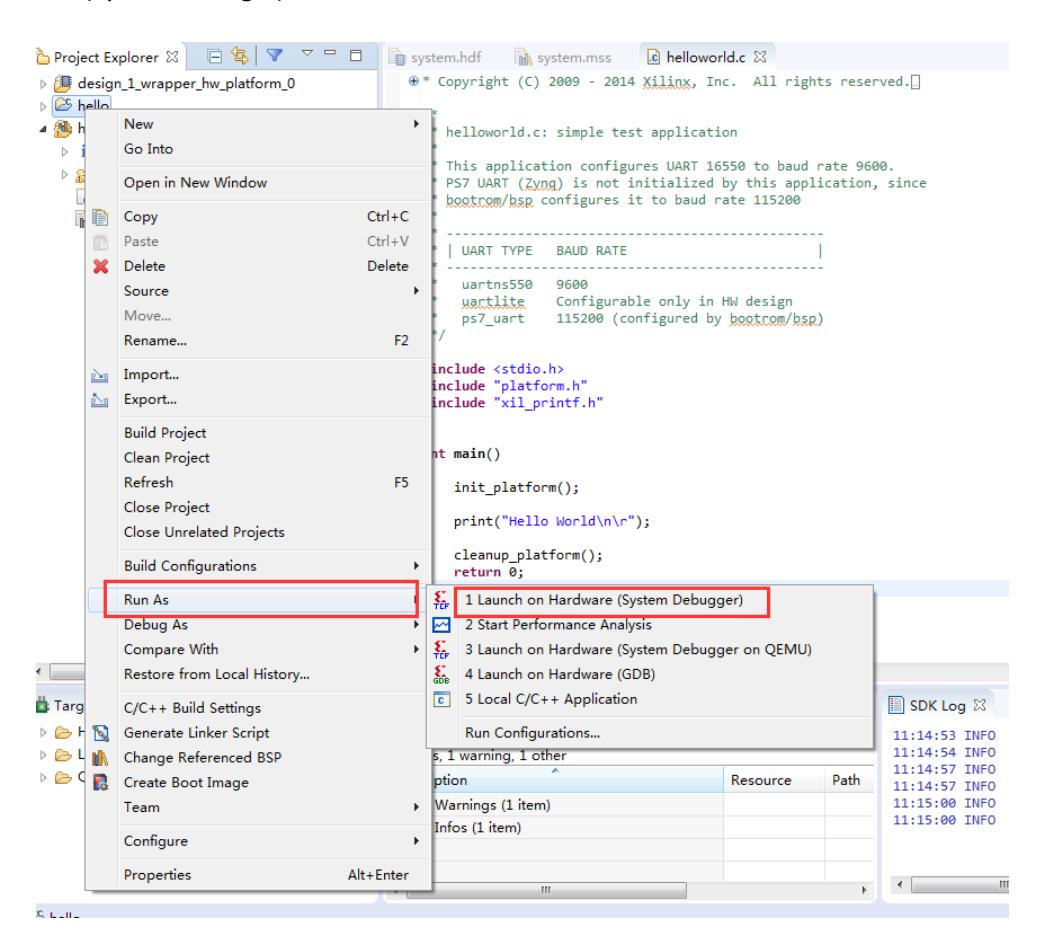
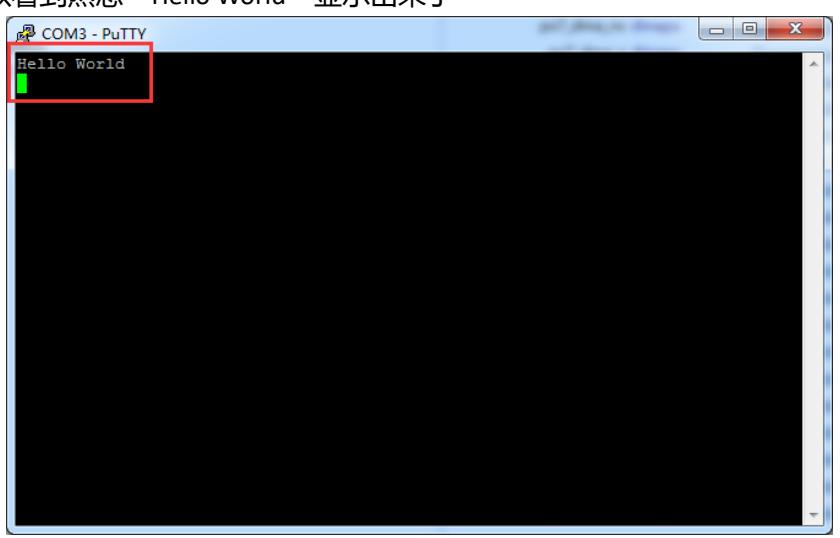
在 Vivado 中选择 File → Launch SDK(或导出硬件后在 SDK 中打开 HDF)。在 SDK 中基于导出的 hardware platform 创建 Application Project。创建 Hello World 应用:New → Application Project,选择 Hello World 模板以快速生成示例应用;BSP(Board Support Package)将随之创建,包含驱动与低层支持库。将目标板通过 JTAG 连接,并使用串口终端(例如 PuTTY,115200,Serial)监听 UART 输出。在 SDK 中运行或调试:通过 Run As → Launch on Hardware(System Debugger) 或 Debug As 进入调试模式;在 Run Configuration 中可选择在运行前重置整个系统并根据需要编程 FPGA 比特流(Program FPGA)。运行示例后,串口终端应显示 Hello World 等输出,表明应用在裸机环境下被正确加载并执行。
引导流程与 BOOT 镜像制作
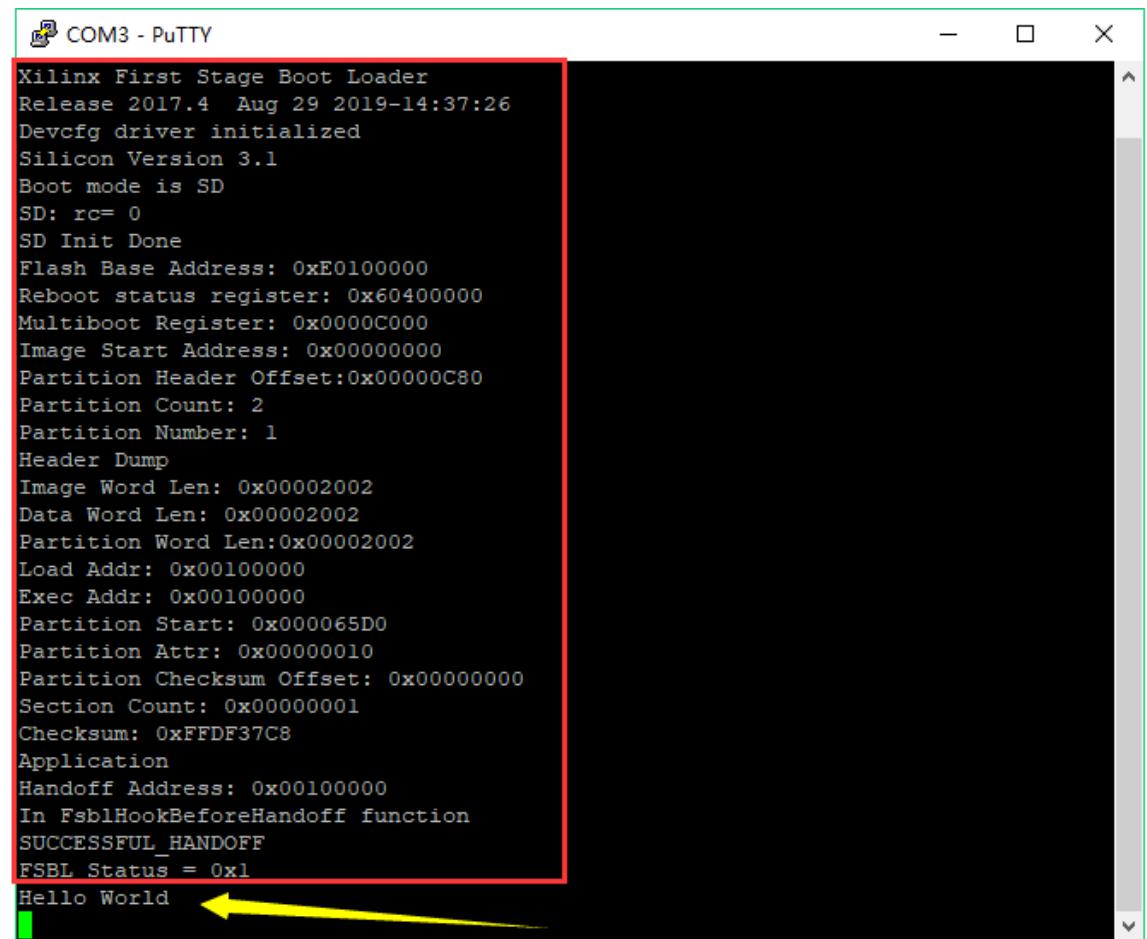
Zynq 启动过程可概括为若干阶段(简述):Stage 0(Boot ROM):器件上电或热复位后执行不可修改的 Boot ROM 代码,Boot ROM 负责从外设(如 QSPI、SD、NAND、NOR、PCAP 等)读取 Stage 1 引导程序(FSBL)并将其拷贝至 OCM 执行。Stage 1(FSBL):FSBL(First Stage Boot Loader)完成 PS 初始化(MIO、时钟、DDR 等)、可选的 PL 比特流加载、并将第二阶段引导或应用程序加载到 DDR。FSBL 可输出调试信息以便诊断启动过程。Stage 2(二级引导器/操作系统引导,如 U-Boot):用于复杂系统引导(如 Linux);对于裸机或简单应用可直接由 FSBL 跳转至用户程序。
FSBL 与 BOOT 镜像的生成要点
在 SDK 中创建 FSBL 应用(选择硬件平台为刚导出的 HDF),可启用调试宏以便在启动过程中输出更多信息。FSBL 模板会包含 ps7_init 等初始化代码。使用 Create Boot Image 向导生成 BOOT.bin。BOOT 镜像的分区顺序关键:首项为 FSBL(fsbl.elf),随后为 bitstream(system.bit,如需)、最后为应用程序(hello.elf)。正确的顺序有助于按预期加载 PL 与 PS 内容。将 BOOT.bin 写入 FAT32 格式的 SD 卡根目录以进行 SD 启动测试;亦可通过 SDK/Vivado 将 BOOT.bin 烧写至 QSPI 以实现 Flash 启动。示例:将 BOOT.bin 与必要文件写入 SD 卡并切换启动模式后,上电即可观察串口输出的启动日志与应用打印信息。
QSPI 编程与自动化脚本
可在 SDK 中通过 Xilinx → Program Flash 进行图形化烧写;亦可在 Hardware Manager 中添加 Configuration Memory Device 并选择相应 Winbond 型号进行编程。为提高效率,可编写批处理(.bat)脚本调用 SDK 的 program_flash 工具实现自动烧写与校验(在脚本中设置显示 u-boot 信息的环境变量、指定 BOOT.bin 与 FSBL 等参数)。示例脚本(请根据安装路径调整):
set XIL_CSE_ZYNQ_DISPLAY_UBOOT_MESSAGES=1
call C:\Xilinx\SDK\2017.4\bin\program_flash -f BOOT.bin -fsbl fsbl.elf -offset 0 -flash_type qspi_single -blank_check -verify
pause常见问题与注意事项
启动 SDK 失败:确保在安装 Vivado 时包含 SDK 组件;若已有旧的 sdk 目录请先删除再尝试重新启动。仅有 PL 逻辑的固化:Zynq 的固化通常由 PS 主导,若仅需固化 PL 逻辑,应在 Vivado 中将 PL 逻辑与 PS 配置合并,并在生成 BOOT.bin 时包含 bitstream(BOOT 分区顺序:FSBL → bitstream → 应用)。引脚与电平:PS MIO 的电平与复用必须与原理图匹配,尤其是 DDR、Ethernet、QSPI、UART 等外设的 Bank 电平,否则会导致外设不可用或损坏。
本章小结
本章演示了 Zynq 系统的典型协同开发流程,阐明了 FPGA 工程师与软件工程师的分工与协作:前者搭建硬件平台并导出硬件描述文件,后者基于该平台开发引导程序与应用。通过本章学习,读者应掌握 PS 的基本配置方法、SDK 中裸机应用的创建与调试、FSBL 与 BOOT 镜像的生成以及常见的启动与固化方式。后续章节将继续探讨 PS 与 PL 的联合调试、设备驱动与更复杂的系统集成问题。